gaussian_blur
- deepinv.physics.blur.gaussian_blur(sigma=(1, 1), angle=0)[source]
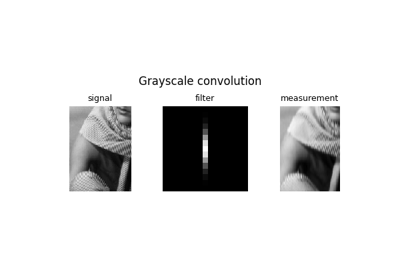
Gaussian blur filter.
Defined as
\[\begin{equation*} G(x, y) = \frac{1}{2\pi\sigma_x\sigma_y} \exp{\left(-\frac{x'^2}{2\sigma_x^2} - \frac{y'^2}{2\sigma_y^2}\right)} \end{equation*}\]where \(x'\) and \(y'\) are the rotated coordinates obtained by rotating $(x, y)$ around the origin by an angle \(\theta\):
\[\begin{split}\begin{align*} x' &= x \cos(\theta) - y \sin(\theta) \\ y' &= x \sin(\theta) + y \cos(\theta) \end{align*}\end{split}\]with \(\sigma_x\) and \(\sigma_y\) the standard deviations along the \(x'\) and \(y'\) axes.
- Parameters:
Examples using gaussian_blur:

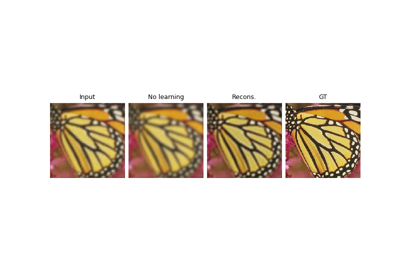
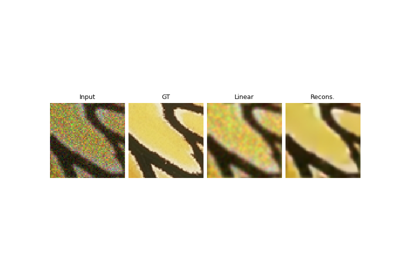
Plug-and-Play algorithm with Mirror Descent for Poisson noise inverse problems.
Plug-and-Play algorithm with Mirror Descent for Poisson noise inverse problems.