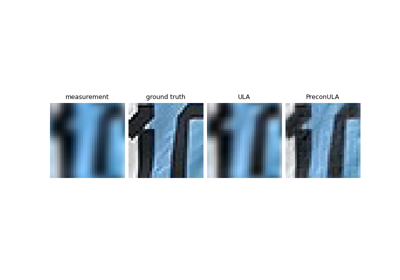
ULA
- class deepinv.sampling.ULA(prior, data_fidelity, step_size=1.0, sigma=0.05, alpha=1.0, max_iter=1000.0, thinning=5, burnin_ratio=0.2, clip=(-1.0, 2.0), thresh_conv=0.001, save_chain=False, g_statistic=<function ULA.<lambda>>, verbose=False)[source]
Bases:
MonteCarloProjected Plug-and-Play Unadjusted Langevin Algorithm.
The algorithm runs the following markov chain iteration (Algorithm 2 from https://arxiv.org/abs/2103.04715):
\[x_{k+1} = \Pi_{[a,b]} \left(x_{k} + \eta \nabla \log p(y|A,x_k) + \eta \alpha \nabla \log p(x_{k}) + \sqrt{2\eta}z_{k+1} \right).\]where \(x_{k}\) is the \(k\) th sample of the Markov chain, \(\log p(y|x)\) is the log-likelihood function, \(\log p(x)\) is the log-prior, \(\eta>0\) is the step size, \(\alpha>0\) controls the amount of regularization, \(\Pi_{[a,b]}(x)\) projects the entries of \(x\) to the interval \([a,b]\) and \(z\sim \mathcal{N}(0,I)\) is a standard Gaussian vector.
Projected PnP-ULA assumes that the denoiser is \(L\)-Lipschitz differentiable
For convergence, ULA required step_size smaller than \(\frac{1}{L+\|A\|_2^2}\)
- Parameters:
prior (deepinv.optim.ScorePrior, torch.nn.Module) – negative log-prior based on a trained or model-based denoiser.
data_fidelity (deepinv.optim.DataFidelity, torch.nn.Module) – negative log-likelihood function linked with the noise distribution in the acquisition physics.
step_size (float) – step size \(\eta>0\) of the algorithm. Tip: use
deepinv.physics.Physics.compute_norm()to compute the Lipschitz constant of the forward operator.sigma (float) – noise level used in the plug-and-play prior denoiser. A larger value of sigma will result in a more regularized reconstruction.
alpha (float) – regularization parameter \(\alpha\)
max_iter (int) – number of Monte Carlo iterations.
thinning (int) – Thins the Markov Chain by an integer \(\geq 1\) (i.e., keeping one out of
thinningsamples to compute posterior statistics).burnin_ratio (float) – percentage of iterations used for burn-in period, should be set between 0 and 1. The burn-in samples are discarded constant with a numerical algorithm.
clip (tuple) – Tuple containing the box-constraints \([a,b]\). If
None, the algorithm will not project the samples.crit_conv (float) – Threshold for verifying the convergence of the mean and variance estimates.
g_statistic (function_handle) – The sampler will compute the posterior mean and variance of the function g_statistic. By default, it is the identity function (lambda x: x), and thus the sampler computes the posterior mean and variance.
verbose (bool) – prints progress of the algorithm.