
Note
New to DeepInverse? Get started with the basics with the 5 minute quickstart tutorial..
Building your custom MCMC sampling algorithm.#
This code shows how to build your custom sampling kernel. Here we build a preconditioned Unadjusted Langevin Algorithm (PreconULA) that takes advantage of the singular value decomposition of the forward operator to accelerate the sampling.
import torch
from typing import Any
import deepinv as dinv
from deepinv.utils.plotting import plot
from deepinv.utils import load_example
Load image from the internet#
This example uses an image of Messi.
device = dinv.utils.get_device()
x = load_example("messi.jpg", img_size=32).to(device)
Selected GPU 0 with 5015.25 MiB free memory
Define forward operator and noise model#
We use a 5x5 box blur as the forward operator and Gaussian noise as the noise model.
sigma = 0.001 # noise level
physics = dinv.physics.BlurFFT(
img_size=(3, 32, 32),
filter=torch.ones((1, 1, 5, 5), device=device) / 25,
device=device,
noise_model=dinv.physics.GaussianNoise(sigma=sigma),
)
Generate the measurement#
Apply the forward model to generate the noisy measurement.
Define the sampling iteration#
In order to define a custom sampling kernel (possibly a Markov kernel which depends on the previous sample), we only need to define the iterator which takes the current sample and returns the next sample.
Here we define a preconditioned ULA iterator (for a Gaussian likelihood), which takes into account the singular value decomposition of the forward operator, \(A=USV^{\top}\), in order to accelerate the sampling.
We modify the standard ULA iteration (see deepinv.sampling.ULAIterator) defined as
by using a matrix-valued step size \(\eta = \eta_0 VRV^{\top}\) where \(R\) is a diagonal matrix with entries \(R_{i,i} = \frac{1}{S_{i,i}^2 + \epsilon}\). The parameter \(\epsilon\) is used to avoid numerical issues when \(S_{i,i}^2\) is close to zero. After some algebra, we obtain the following iteration
We exploit the methods of deepinv.physics.DecomposablePhysics to compute the matrix-vector products
with \(V\) and \(V^{\top}\) efficiently. Note that computing the matrix-vector product with \(R\) and
\(S\) is trivial since they are diagonal matrices.
See deepinv.sampling.BaseSampling for more details on how to create new iterators.
class PreconULAIterator(dinv.sampling.SamplingIterator):
def __init__(self, algo_params):
super().__init__(algo_params)
def forward(self, X, y, physics, data_fidelity, prior, iteration) -> dict[str, Any]:
x = X["x"]
x_bar = physics.V_adjoint(x)
y_bar = physics.U_adjoint(y)
step_size = self.algo_params["step_size"] / (
self.algo_params["epsilon"] + physics.mask.pow(2)
)
noise = torch.randn_like(x_bar)
sigma2_noise = 1 / data_fidelity.norm
lhood = -(physics.mask.pow(2) * x_bar - physics.mask * y_bar) / sigma2_noise
lprior = (
-physics.V_adjoint(prior.grad(x, self.algo_params["sigma"]))
* self.algo_params["alpha"]
)
return {
"x": x
+ physics.V(step_size * (lhood + lprior) + (2 * step_size).sqrt() * noise)
}
Define the prior#
The score of a distribution can be approximated using a plug-and-play denoiser via the
deepinv.optim.ScorePrior class.
This example uses a simple median filter as a plug-and-play denoiser. The hyperparameter \(\sigma_d\) controls the strength of the prior.
prior = dinv.optim.ScorePrior(denoiser=dinv.models.MedianFilter())
Build our sampler#
Using our custom iterator, we can build a sampler class by calling deepinv.sampling.sampling_builder()
This function returns an instance of deepinv.sampling.BaseSampling which takes care of the sampling procedure
(calculating mean and variance, taking into account sample thinning and burnin iterations, etc),
providing a convenient interface to the user.
# load Gaussian Likelihood
likelihood = dinv.optim.data_fidelity.L2(sigma=sigma)
iterations = int(1e2) if torch.cuda.is_available() else 10
# shared ULA/ PreconULA params
step_size = 0.5 * (sigma**2)
denoiser_sigma = 0.1
# parameters for PreconULA
params_preconula = {
"step_size": step_size,
"sigma": denoiser_sigma,
"alpha": 1.0,
"epsilon": 0.01,
}
# build our PreconULA sampler
preconula = dinv.sampling.sampling_builder(
PreconULAIterator(params_preconula),
likelihood,
prior,
max_iter=iterations,
burnin_ratio=0.1,
thinning=1,
verbose=True,
)
# parameters for ULA
params_ula = {
"step_size": step_size,
"sigma": denoiser_sigma,
"alpha": 1.0,
}
# build our ULA sampler
ula = dinv.sampling.sampling_builder(
"ULA",
likelihood,
prior,
params_algo=params_ula,
max_iter=iterations,
burnin_ratio=0.1,
thinning=1,
verbose=True,
)
Run sampling algorithms and plot results#
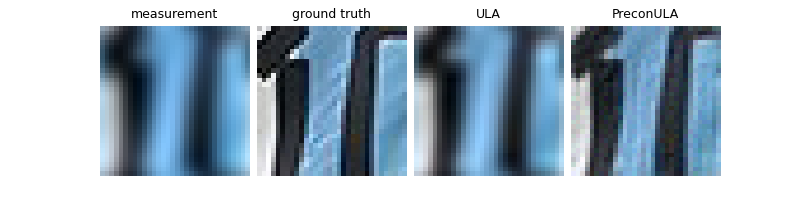
Each sampling algorithm returns the posterior mean and variance. We compare the posterior mean of each algorithm with a simple linear reconstruction.
The preconditioned step size of the new sampler provides a significant acceleration to standard ULA, which is evident in the PSNR of the posterior mean.
Note
The preconditioned ULA sampler requires a forward operator with an easy singular value decomposition
(e.g. which inherit from deepinv.physics.DecomposablePhysics) and the noise to be Gaussian,
whereas ULA is more general.
ula_mean, ula_var = ula.sample(y, physics)
preconula_mean, preconula_var = preconula.sample(y, physics)
# compute linear inverse
x_lin = physics.A_adjoint(y)
# compute PSNR
psnr_lin = dinv.metric.PSNR()(x, x_lin).item()
psnr_ula = dinv.metric.PSNR()(x, ula_mean).item()
psnr_preconula = dinv.metric.PSNR()(x, preconula_mean).item()
print(f"Linear reconstruction PSNR: {psnr_lin:.2f} dB")
print(f"ULA posterior mean PSNR: {psnr_ula:.2f} dB")
print(f"PreconULA posterior mean PSNR: {psnr_preconula:.2f} dB")
# plot results
plot(
{
"Ground Truth": x,
"Measurement": y,
"ULA": ula_mean,
"PreconULA": preconula_mean,
},
subtitles=[
f"PSNR:",
f"{psnr_lin:.2f} dB",
f"{psnr_ula:.2f} dB",
f"{psnr_preconula:.2f} dB",
],
)
0%| | 0/100 [00:00<?, ?it/s]
1%| | 1/100 [00:00<00:30, 3.21it/s]
65%|██████▌ | 65/100 [00:00<00:00, 203.07it/s]
100%|██████████| 100/100 [00:00<00:00, 213.75it/s]
Iteration 99, current converge crit. = 3.92E-04, objective = 1.00E-03
0%| | 0/100 [00:00<?, ?it/s]
62%|██████▏ | 62/100 [00:00<00:00, 619.75it/s]
100%|██████████| 100/100 [00:00<00:00, 614.29it/s]
Iteration 99, current converge crit. = 8.46E-04, objective = 1.00E-03
Linear reconstruction PSNR: 17.31 dB
ULA posterior mean PSNR: 23.34 dB
PreconULA posterior mean PSNR: 27.45 dB
Total running time of the script: (0 minutes 1.579 seconds)