Trainer
- class deepinv.Trainer(model, physics, optimizer, train_dataloader, ...)[source]
Bases:
objectTrainer class for training a reconstruction network.
Training can be done by calling the
deepinv.Trainer.train()method, whereas testing can be done by calling thedeepinv.Trainer.test()method.Training details are saved every
ckp_intervalepochs in the following formatsave_path/yyyy-mm-dd_hh-mm-ss/ckp_{epoch}.pth.tar
where
.pth.tarfile contains a dictionary with the keys:epochcurrent epoch,state_dictthe state dictionary of the model,lossthe loss history,optimizerthe state dictionary of the optimizer, and ``eval_metrics` the evaluation metrics history.The class provides a flexible training loop that can be customized by the user. In particular, the user can rewrite the
deepinv.Trainer.compute_loss()method to define their custom training step without having to write all the training code from scratch:class CustomTrainer(Trainer): def compute_loss(self, physics, x, y, train=True, epoch: int = None): logs = {} self.optimizer.zero_grad() # Zero the gradients # Evaluate reconstruction network x_net = self.model_inference(y=y, physics=physics) # Compute the losses loss_total = 0 for k, l in enumerate(self.losses): loss = l(x=x, x_net=x_net, y=y, physics=physics, model=self.model, epoch=epoch) loss_total += loss.mean() metric = self.logs_total_loss_train if train else self.logs_total_loss_eval metric.update(loss_total.item()) logs[f"TotalLoss"] = metric.avg if train: loss_total.backward() # Backward the total loss self.optimizer.step() # Optimizer step return x_net, logs
If the user wants to change the way the metrics are computed, they can rewrite the
deepinv.Trainer.compute_metrics()method. The user can also change the way samples are generated by overriding either thedeepinv.Trainer.get_samples_online()method or thedeepinv.Trainer.get_samples_offline()method, e.g. to change the physics parameters on-the-fly with parameters from the dataset.Use
deepinv.Trainer.get_samples_online()when measurements are simulated from a ground truth returned by the dataloader.Use
deepinv.Trainer.get_samples_offline()when both the ground truth and measurements are returned by the dataloader (and also optionally physics generator params).
For instance, in MRI, the dataloader often returns both the measurements and the mask associated with the measurements. In this case, to update the
deepinv.physics.Physics()parameters accordingly, a potential implementation would be:class CustomTrainer(Trainer): def get_samples_offline(self, iterators, g): # Suppose your dataset returns per-sample masks, e.g. in MRI x, y, mask = next(iterators[g]) # Suppose physics has class params such as DecomposablePhysics or MRI physics = self.physics[g] # Update physics parameters deterministically (i.e. not using a random generator) physics.update_parameters(mask=mask.to(self.device)) return x.to(self.device), y.to(self.device), physics
Note
The training code can synchronize with Weights & Biases for logging and visualization by setting
wandb_vis=True. The user can also customize the wandb setup by providing a dictionary with the setup for wandb.Note
The losses and evaluation metrics can be chosen from the libraries’ training losses, or can be a custom loss function, as long as it takes as input
(x, x_net, y, physics, model)and returns a scalar, wherexis the ground reconstruction,x_netis the network reconstruction \(\inversef{y}{A}\),yis the measurement vector,physicsis the forward operator andmodelis the reconstruction network. Note that not all inpus need to be used by the loss, e.g., self-supervised losses will not make use ofx.Warning
If a physics generator is used to generate params for online measurements, the generated params will vary each epoch. If this is not desired (you want the same online measurements each epoch), set
loop_physics_generator=True. Caveat: this requiresshuffle=Falsein your dataloaders. An alternative solution is to generate and save params offline usingdeepinv.datasets.generate_dataset().- Parameters:
model (torch.nn.Module) – Reconstruction network, which can be PnP, unrolled, artifact removal or any other custom reconstruction network.
physics (deepinv.physics.Physics, list[deepinv.physics.Physics]) – Forward operator(s) used by the reconstruction network.
epochs (int) – Number of training epochs. Default is 100.
optimizer (torch.nn.optim.Optimizer) – Torch optimizer for training the network.
train_dataloader (torch.utils.data.DataLoader, list[torch.utils.data.DataLoader]) – Train data loader(s) should provide a a signal x or a tuple of (x, y) signal/measurement pairs.
losses (deepinv.loss.Loss, list[deepinv.loss.Loss]) – Loss or list of losses used for training the model. Optionally wrap losses using a loss scheduler for more advanced training. See the libraries’ training losses. By default, it uses the supervised mean squared error. Where relevant, the underlying metric should have
reduction=Noneas we perform the averaging usingdeepinv.utils.AverageMeterto deal with uneven batch sizes.eval_dataloader (None, torch.utils.data.DataLoader, list[torch.utils.data.DataLoader]) – Evaluation data loader(s) should provide a signal x or a tuple of (x, y) signal/measurement pairs.
scheduler (None, torch.optim.lr_scheduler) – Torch scheduler for changing the learning rate across iterations.
online_measurements (bool) – Generate the measurements in an online manner at each iteration by calling
physics(x). This results in a wider range of measurements if the physics’ parameters, such as parameters of the forward operator or noise realizations, can change between each sample; the measurements are loaded from the training dataset.physics_generator (None, deepinv.physics.generator.PhysicsGenerator) – Optional physics generator for generating the physics operators. If not None, the physics operators are randomly sampled at each iteration using the generator. Should be used in conjunction with
online_measurements=True. Also seeloop_physics_generator.metrics (Metric, list[Metric]) – Metric or list of metrics used for evaluating the model. They should have
reduction=Noneas we perform the averaging usingdeepinv.utils.AverageMeterto deal with uneven batch sizes. See the libraries’ evaluation metrics.grad_clip (float) – Gradient clipping value for the optimizer. If None, no gradient clipping is performed.
ckp_interval (int) – The model is saved every
ckp_intervalepochs.eval_interval (int) – Number of epochs between each evaluation of the model on the evaluation set.
save_path (str) – Directory in which to save the trained model.
device (str) – Device on which to run the training (e.g., ‘cuda’ or ‘cpu’).
verbose (bool) – Output training progress information in the console.
show_progress_bar (bool) – Show a progress bar during training.
plot_images (bool) – Plots reconstructions every
ckp_intervalepochs.wandb_vis (bool) – Logs data onto Weights & Biases, see https://wandb.ai/ for more details.
wandb_setup (dict) – Dictionary with the setup for wandb, see https://docs.wandb.ai/quickstart for more details.
plot_measurements (bool) – Plot the measurements y. default=True.
check_grad (bool) – Compute and print the gradient norm at each iteration.
ckpt_pretrained (str) – path of the pretrained checkpoint. If None, no pretrained checkpoint is loaded.
freq_plot (int) – Frequency of plotting images to wandb during train evaluation (at the end of each epoch). If
1, plots at each epoch.verbose_individual_losses (bool) – If
True, the value of individual losses are printed during training. Otherwise, only the total loss is printed.display_losses_eval (bool) – If
True, the losses are displayed during evaluation.rescale_mode (str) – Rescale mode for plotting images. Default is
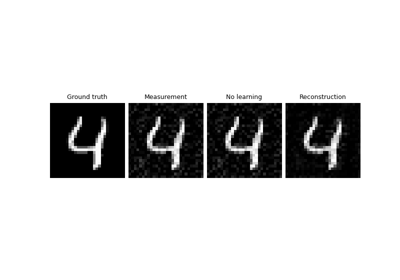
'clip'.compare_no_learning (bool) – If
True, the no learning method is compared to the network reconstruction.no_learning_method (str) – Reconstruction method used for the no learning comparison. Options are
'A_dagger','A_adjoint','prox_l2', or'y'. Default is'A_dagger'. The user can also provide a custom method by overriding thedeepinv.Trainer.no_learning_inference()method.loop_physics_generator (bool) – if True, resets the physics generator back to its initial state at the beginning of each epoch, so that the same measurements are generated each epoch. Requires shuffle=False in dataloaders. If False, generates new physics every epoch. Used in conjunction with
physics_generator.
- compute_loss(physics, x, y, train=True, epoch: int | None = None)[source]
Compute the loss and perform the backward pass.
It evaluates the reconstruction network, computes the losses, and performs the backward pass.
- Parameters:
physics (deepinv.physics.Physics) – Current physics operator.
x (torch.Tensor) – Ground truth.
y (torch.Tensor) – Measurement.
train (bool) – If
True, the model is trained, otherwise it is evaluated.epoch (int) – current epoch.
- Returns:
(tuple) The network reconstruction x_net (for plotting and computing metrics) and the logs (for printing the training progress).
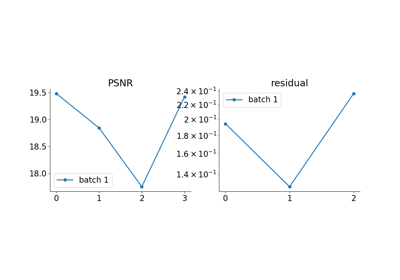
- compute_metrics(x, x_net, y, physics, logs, train=True, epoch: int | None = None)[source]
Compute the metrics.
It computes the metrics over the batch.
- Parameters:
x (torch.Tensor) – Ground truth.
x_net (torch.Tensor) – Network reconstruction.
y (torch.Tensor) – Measurement.
physics (deepinv.physics.Physics) – Current physics operator.
logs (dict) – Dictionary containing the logs for printing the training progress.
train (bool) – If
True, the model is trained, otherwise it is evaluated.epoch (int) – current epoch.
- Returns:
The logs with the metrics.
- get_samples(iterators, g)[source]
Get the samples.
This function returns a dictionary containing necessary data for the model inference. It needs to contain the measurement, the ground truth, and the current physics operator, but can also contain additional data.
- get_samples_offline(iterators, g)[source]
Get the samples for the offline measurements.
In this setting, samples have been generated offline and are loaded from the dataloader. This function returns a tuple containing necessary data for the model inference. It needs to contain the measurement, the ground truth, and the current physics operator, but can also contain additional data (you can override this function to add custom data).
If the dataloader returns 3-tuples, this is assumed to be
(x, y, params)whereparamsis a dict of physics generator params. These params are then used to update the physics.
- get_samples_online(iterators, g)[source]
Get the samples for the online measurements.
In this setting, a new sample is generated at each iteration by calling the physics operator. This function returns a dictionary containing necessary data for the model inference. It needs to contain the measurement, the ground truth, and the current physics operator, but can also contain additional data.
- log_metrics_wandb(logs, epoch, train=True)[source]
Log the metrics to wandb.
It logs the metrics to wandb.
- model_inference(y, physics, x=None, train=True, **kwargs)[source]
Perform the model inference.
It returns the network reconstruction given the samples.
- Parameters:
y (torch.Tensor) – Measurement.
physics (deepinv.physics.Physics) – Current physics operator.
x (torch.Tensor) – Optional ground truth, used for computing convergence metrics.
- Returns:
The network reconstruction.
- no_learning_inference(y, physics)[source]
Perform the no learning inference.
By default it returns the (linear) pseudo-inverse reconstruction given the measurement.
- Parameters:
y (torch.Tensor) – Measurement.
physics (deepinv.physics.Physics) – Current physics operator.
- Returns:
Reconstructed image.
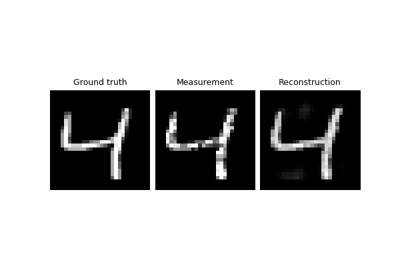
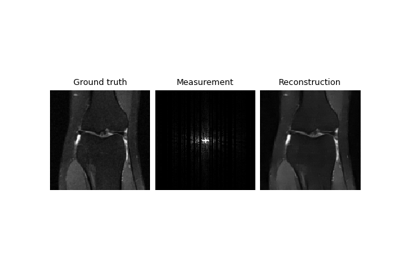
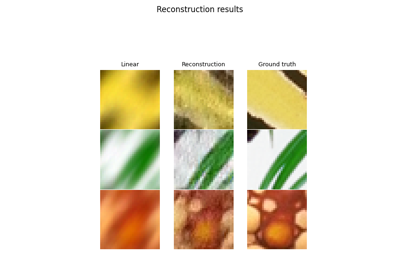
- plot(epoch, physics, x, y, x_net, train=True)[source]
Plot and optinally save the reconstructions.
- Parameters:
epoch (int) – Current epoch.
physics (deepinv.physics.Physics) – Current physics operator.
x (torch.Tensor) – Ground truth.
y (torch.Tensor) – Measurement.
x_net (torch.Tensor) – Network reconstruction.
train (bool) – If
True, the model is trained, otherwise it is evaluated.
- save_model(epoch, eval_metrics=None, state={})[source]
Save the model.
It saves the model every
ckp_intervalepochs.
- setup_train(train=True, **kwargs)[source]
Set up the training process.
It initializes the wandb logging, the different metrics, the save path, the physics and dataloaders, and the pretrained checkpoint if given.
- step(epoch, progress_bar, train=True, last_batch=False)[source]
Train/Eval a batch.
It performs the forward pass, the backward pass, and the evaluation at each iteration.
- Parameters:
- Returns:
The current physics operator, the ground truth, the measurement, and the network reconstruction.
- test(test_dataloader, save_path=None, compare_no_learning=True)[source]
Test the model.
- Parameters:
test_dataloader (torch.utils.data.DataLoader, list[torch.utils.data.DataLoader]) – Test data loader(s) should provide a a signal x or a tuple of (x, y) signal/measurement pairs.
save_path (str) – Directory in which to save the trained model.
compare_no_learning (bool) – If
True, the linear reconstruction is compared to the network reconstruction.
- Returns:
The trained model.
Examples using Trainer:
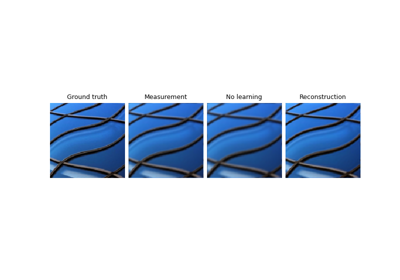
Imaging inverse problems with adversarial networks
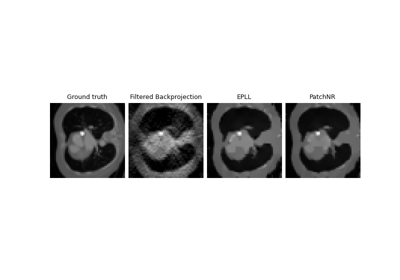
Patch priors for limited-angle computed tomography
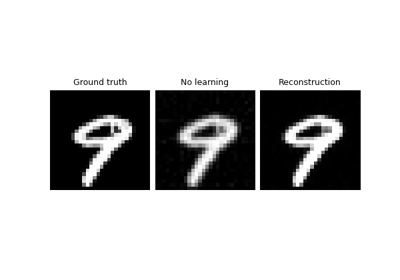
Self-supervised learning with measurement splitting
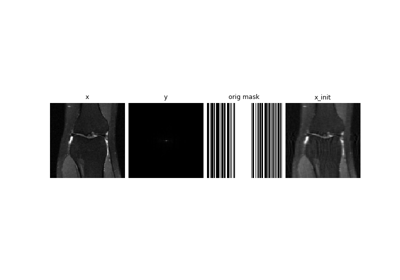
Self-supervised MRI reconstruction with Artifact2Artifact

Self-supervised denoising with the Neighbor2Neighbor loss.
Self-supervised learning with Equivariant Imaging for MRI.
Self-supervised learning from incomplete measurements of multiple operators.
Learned Iterative Soft-Thresholding Algorithm (LISTA) for compressed sensing
Deep Equilibrium (DEQ) algorithms for image deblurring
Unfolded Chambolle-Pock for constrained image inpainting