
Note
New to DeepInverse? Get started with the basics with the 5 minute quickstart tutorial..
Deep Equilibrium (DEQ) algorithms for image deblurring#
This a toy example to show you how to use DEQ to solve a deblurring problem. Note that this is a small dataset for training. For optimal results, use a larger dataset.
For now DEQ is only possible with PGD, HQS and GD optimization algorithms.
import deepinv as dinv
from pathlib import Path
import torch
from torch.utils.data import DataLoader
from deepinv.optim.data_fidelity import L2
from deepinv.optim.prior import PnP
from deepinv.optim import PGD
from torchvision import transforms
from deepinv.utils import load_dataset, load_degradation
Setup paths for data loading and results.#
Selected GPU 0 with 5785.25 MiB free memory
Load base image datasets and degradation operators.#
In this example, we use the CBSD500 dataset and the Set3C dataset for testing.
img_size = 32
n_channels = 3 # 3 for color images, 1 for gray-scale images
operation = "deblurring"
# For simplicity, we use a small dataset for training.
# To be replaced for optimal results. For example, you can use the larger "drunet" dataset.
train_dataset_name = "CBSD500"
test_dataset_name = "set3c"
# Generate training and evaluation datasets in HDF5 folders and load them.
test_transform = transforms.Compose(
[transforms.CenterCrop(img_size), transforms.ToTensor()]
)
train_transform = transforms.Compose(
[transforms.RandomCrop(img_size), transforms.ToTensor()]
)
train_base_dataset = load_dataset(train_dataset_name, transform=train_transform)
test_base_dataset = load_dataset(test_dataset_name, transform=test_transform)
Generate a dataset of low resolution images and load it.#
We use the Downsampling class from the physics module to generate a dataset of low resolution images.
# Use parallel dataloader if using a GPU to speed up training, otherwise, as all computes are on CPU, use synchronous
# dataloading.
num_workers = 4 if torch.cuda.is_available() else 0
# Degradation parameters
noise_level_img = 0.03
# Generate a motion blur operator.
kernel_index = 1 # which kernel to chose among the 8 motion kernels from 'Levin09.mat'
kernel_torch = load_degradation("Levin09.npy", DEG_DIR / "kernels", index=kernel_index)
kernel_torch = (
kernel_torch.unsqueeze(0).unsqueeze(0).to(torch.float32)
) # add batch and channel dimensions
# Generate the gaussian blur downsampling operator.
physics = dinv.physics.BlurFFT(
img_size=(n_channels, img_size, img_size),
filter=kernel_torch,
device=device,
noise_model=dinv.physics.GaussianNoise(sigma=noise_level_img),
)
my_dataset_name = "demo_DEQ"
n_images_max = (
1000 if torch.cuda.is_available() else 10
) # maximal number of images used for training
measurement_dir = DATA_DIR / train_dataset_name / operation
generated_datasets_path = dinv.datasets.generate_dataset(
train_dataset=train_base_dataset,
test_dataset=test_base_dataset,
physics=physics,
device=device,
save_dir=measurement_dir,
train_datapoints=n_images_max,
num_workers=num_workers,
dataset_filename=str(my_dataset_name),
)
train_dataset = dinv.datasets.HDF5Dataset(path=generated_datasets_path, train=True)
test_dataset = dinv.datasets.HDF5Dataset(path=generated_datasets_path, train=False)
Levin09.npy degradation downloaded in degradations/kernels
Dataset has been saved at measurements/CBSD500/deblurring/demo_DEQ0.h5
Define the DEQ algorithm.#
We use the deepinv.optim.PGD() with the argument DEQ=True to defined the DEQ architecture.
The chosen algorithm is here PGD (Proximal Gradient Descent).
Note for DEQ, the prior and regularization parameters should be common for all iterations
to keep a constant fixed-point operator.
# Select the data fidelity term
data_fidelity = L2()
# Set up the trainable denoising prior. Here the prior model is common for all iterations. We use here a pretrained denoiser.
prior = PnP(denoiser=dinv.models.DnCNN(depth=20, pretrained="download").to(device))
# Unrolled optimization algorithm parameters
max_iter = 20 if torch.cuda.is_available() else 10
stepsize = [1.0] # stepsize of the algorithm
sigma_denoiser = [0.03] # noise level parameter of the denoiser
jacobian_free = False # does not perform Jacobian inversion.
trainable_params = [
"stepsize",
"sigma_denoiser",
] # define which parameters are trainable. Here the stepsize and noise level of the denoiser are trained.
# Define the unfolded trainable model.
model = PGD(
DEQ=True,
trainable_params=trainable_params,
stepsize=stepsize,
sigma_denoiser=sigma_denoiser,
data_fidelity=data_fidelity,
max_iter=max_iter,
prior=prior,
anderson_acceleration=True,
)
Define the training parameters.#
We use the Adam optimizer and the StepLR scheduler.
# training parameters
epochs = 10 if torch.cuda.is_available() else 2
learning_rate = 1e-4
train_batch_size = 32 if torch.cuda.is_available() else 1
test_batch_size = 3
# choose optimizer and scheduler
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate, weight_decay=1e-8)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=int(epochs * 0.8))
# choose supervised training loss
losses = [dinv.loss.SupLoss(metric=dinv.metric.MSE())]
# Logging parameters
verbose = True
train_dataloader = DataLoader(
train_dataset, batch_size=train_batch_size, num_workers=num_workers, shuffle=True
)
test_dataloader = DataLoader(
test_dataset, batch_size=test_batch_size, num_workers=num_workers, shuffle=False
)
Train the network#
We train the network using the library’s train function.
trainer = dinv.Trainer(
model=model,
physics=physics,
epochs=epochs,
scheduler=scheduler,
device=device,
losses=losses,
optimizer=optimizer,
train_dataloader=train_dataloader,
eval_dataloader=test_dataloader,
save_path=str(CKPT_DIR / operation),
verbose=verbose,
show_progress_bar=True, # disable progress bar for better vis in sphinx gallery.
)
trainer.train()
model = trainer.load_best_model() # load model with best validation PSNR
/local/jtachell/deepinv/deepinv/deepinv/training/trainer.py:1356: UserWarning: non_blocking_transfers=True but DataLoader.pin_memory=False; set pin_memory=True to overlap host-device copies with compute.
self.setup_train()
The model has 668229 trainable parameters
/local/jtachell/deepinv/deepinv/deepinv/training/trainer.py:549: UserWarning: Update progress bar frequency of 1 may slow down training on GPU. Consider setting freq_update_progress_bar > 1.
warnings.warn(
0%| | 0/32 [00:00<?, ?it/s]
Train epoch 1/10: 0%| | 0/32 [00:00<?, ?it/s]/local/jtachell/deepinv/deepinv/deepinv/optim/utils.py:57: UserWarning: No explicit prior has been given to compute the objective function. Computing the data-fidelity term only.
warnings.warn(
Train epoch 1/10: 0%| | 0/32 [00:00<?, ?it/s, TotalLoss=0.00456, PSNR=26.3]
Train epoch 1/10: 3%|▎ | 1/32 [00:00<00:23, 1.34it/s, TotalLoss=0.00456, PSNR=26.3]
Train epoch 1/10: 3%|▎ | 1/32 [00:00<00:23, 1.34it/s, TotalLoss=0.00456, PSNR=26.3]
Train epoch 1/10: 3%|▎ | 1/32 [00:01<00:23, 1.34it/s, TotalLoss=0.00448, PSNR=26.3]
Train epoch 1/10: 6%|▋ | 2/32 [00:01<00:18, 1.60it/s, TotalLoss=0.00448, PSNR=26.3]
Train epoch 1/10: 6%|▋ | 2/32 [00:01<00:18, 1.60it/s, TotalLoss=0.00448, PSNR=26.3]
Train epoch 1/10: 6%|▋ | 2/32 [00:01<00:18, 1.60it/s, TotalLoss=0.00457, PSNR=26.6]
Train epoch 1/10: 9%|▉ | 3/32 [00:01<00:17, 1.69it/s, TotalLoss=0.00457, PSNR=26.6]
Train epoch 1/10: 9%|▉ | 3/32 [00:01<00:17, 1.69it/s, TotalLoss=0.00457, PSNR=26.6]
Train epoch 1/10: 9%|▉ | 3/32 [00:02<00:17, 1.69it/s, TotalLoss=0.00461, PSNR=26.2]
Train epoch 1/10: 12%|█▎ | 4/32 [00:02<00:16, 1.74it/s, TotalLoss=0.00461, PSNR=26.2]
Train epoch 1/10: 12%|█▎ | 4/32 [00:02<00:16, 1.74it/s, TotalLoss=0.00461, PSNR=26.2]
Train epoch 1/10: 12%|█▎ | 4/32 [00:02<00:16, 1.74it/s, TotalLoss=0.00447, PSNR=26.2]
Train epoch 1/10: 16%|█▌ | 5/32 [00:02<00:15, 1.78it/s, TotalLoss=0.00447, PSNR=26.2]
Train epoch 1/10: 16%|█▌ | 5/32 [00:02<00:15, 1.78it/s, TotalLoss=0.00447, PSNR=26.2]
Train epoch 1/10: 16%|█▌ | 5/32 [00:03<00:15, 1.78it/s, TotalLoss=0.00439, PSNR=26.2]
Train epoch 1/10: 19%|█▉ | 6/32 [00:03<00:14, 1.80it/s, TotalLoss=0.00439, PSNR=26.2]
Train epoch 1/10: 19%|█▉ | 6/32 [00:03<00:14, 1.80it/s, TotalLoss=0.00439, PSNR=26.2]
Train epoch 1/10: 19%|█▉ | 6/32 [00:03<00:14, 1.80it/s, TotalLoss=0.00432, PSNR=26.4]
Train epoch 1/10: 22%|██▏ | 7/32 [00:04<00:13, 1.82it/s, TotalLoss=0.00432, PSNR=26.4]
Train epoch 1/10: 22%|██▏ | 7/32 [00:04<00:13, 1.82it/s, TotalLoss=0.00432, PSNR=26.4]
Train epoch 1/10: 22%|██▏ | 7/32 [00:04<00:13, 1.82it/s, TotalLoss=0.00418, PSNR=26.6]
Train epoch 1/10: 25%|██▌ | 8/32 [00:04<00:13, 1.78it/s, TotalLoss=0.00418, PSNR=26.6]
Train epoch 1/10: 25%|██▌ | 8/32 [00:04<00:13, 1.78it/s, TotalLoss=0.00418, PSNR=26.6]
Train epoch 1/10: 25%|██▌ | 8/32 [00:05<00:13, 1.78it/s, TotalLoss=0.0043, PSNR=26.5]
Train epoch 1/10: 28%|██▊ | 9/32 [00:05<00:12, 1.79it/s, TotalLoss=0.0043, PSNR=26.5]
Train epoch 1/10: 28%|██▊ | 9/32 [00:05<00:12, 1.79it/s, TotalLoss=0.0043, PSNR=26.5]
Train epoch 1/10: 28%|██▊ | 9/32 [00:05<00:12, 1.79it/s, TotalLoss=0.00427, PSNR=26.7]
Train epoch 1/10: 31%|███▏ | 10/32 [00:05<00:12, 1.81it/s, TotalLoss=0.00427, PSNR=26.7]
Train epoch 1/10: 31%|███▏ | 10/32 [00:05<00:12, 1.81it/s, TotalLoss=0.00427, PSNR=26.7]
Train epoch 1/10: 31%|███▏ | 10/32 [00:06<00:12, 1.81it/s, TotalLoss=0.00432, PSNR=26.6]
Train epoch 1/10: 34%|███▍ | 11/32 [00:06<00:11, 1.82it/s, TotalLoss=0.00432, PSNR=26.6]
Train epoch 1/10: 34%|███▍ | 11/32 [00:06<00:11, 1.82it/s, TotalLoss=0.00432, PSNR=26.6]
Train epoch 1/10: 34%|███▍ | 11/32 [00:06<00:11, 1.82it/s, TotalLoss=0.00436, PSNR=26.4]
Train epoch 1/10: 38%|███▊ | 12/32 [00:06<00:10, 1.83it/s, TotalLoss=0.00436, PSNR=26.4]
Train epoch 1/10: 38%|███▊ | 12/32 [00:06<00:10, 1.83it/s, TotalLoss=0.00436, PSNR=26.4]
Train epoch 1/10: 38%|███▊ | 12/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00431, PSNR=26.4]
Train epoch 1/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00431, PSNR=26.4]
Train epoch 1/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00431, PSNR=26.4]
Train epoch 1/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00438, PSNR=26.4]
Train epoch 1/10: 44%|████▍ | 14/32 [00:07<00:09, 1.83it/s, TotalLoss=0.00438, PSNR=26.4]
Train epoch 1/10: 44%|████▍ | 14/32 [00:07<00:09, 1.83it/s, TotalLoss=0.00438, PSNR=26.4]
Train epoch 1/10: 44%|████▍ | 14/32 [00:08<00:09, 1.83it/s, TotalLoss=0.00435, PSNR=26.4]
Train epoch 1/10: 47%|████▋ | 15/32 [00:08<00:09, 1.83it/s, TotalLoss=0.00435, PSNR=26.4]
Train epoch 1/10: 47%|████▋ | 15/32 [00:08<00:09, 1.83it/s, TotalLoss=0.00435, PSNR=26.4]
Train epoch 1/10: 47%|████▋ | 15/32 [00:08<00:09, 1.83it/s, TotalLoss=0.00431, PSNR=26.5]
Train epoch 1/10: 50%|█████ | 16/32 [00:08<00:08, 1.83it/s, TotalLoss=0.00431, PSNR=26.5]
Train epoch 1/10: 50%|█████ | 16/32 [00:08<00:08, 1.83it/s, TotalLoss=0.00431, PSNR=26.5]
Train epoch 1/10: 50%|█████ | 16/32 [00:09<00:08, 1.83it/s, TotalLoss=0.00434, PSNR=26.4]
Train epoch 1/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00434, PSNR=26.4]
Train epoch 1/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00434, PSNR=26.4]
Train epoch 1/10: 53%|█████▎ | 17/32 [00:10<00:08, 1.84it/s, TotalLoss=0.00439, PSNR=26.3]
Train epoch 1/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.83it/s, TotalLoss=0.00439, PSNR=26.3]
Train epoch 1/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.83it/s, TotalLoss=0.00439, PSNR=26.3]
Train epoch 1/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.83it/s, TotalLoss=0.00436, PSNR=26.4]
Train epoch 1/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00436, PSNR=26.4]
Train epoch 1/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00436, PSNR=26.4]
Train epoch 1/10: 59%|█████▉ | 19/32 [00:11<00:07, 1.84it/s, TotalLoss=0.00439, PSNR=26.4]
Train epoch 1/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.84it/s, TotalLoss=0.00439, PSNR=26.4]
Train epoch 1/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.84it/s, TotalLoss=0.00439, PSNR=26.4]
Train epoch 1/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.84it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 66%|██████▌ | 21/32 [00:12<00:05, 1.84it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.82it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.82it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.82it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 72%|███████▏ | 23/32 [00:12<00:05, 1.77it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 72%|███████▏ | 23/32 [00:12<00:05, 1.77it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 72%|███████▏ | 23/32 [00:13<00:05, 1.77it/s, TotalLoss=0.00442, PSNR=26.3]
Train epoch 1/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.79it/s, TotalLoss=0.00442, PSNR=26.3]
Train epoch 1/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.79it/s, TotalLoss=0.00442, PSNR=26.3]
Train epoch 1/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.79it/s, TotalLoss=0.00443, PSNR=26.3]
Train epoch 1/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.81it/s, TotalLoss=0.00443, PSNR=26.3]
Train epoch 1/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.81it/s, TotalLoss=0.00443, PSNR=26.3]
Train epoch 1/10: 78%|███████▊ | 25/32 [00:14<00:03, 1.81it/s, TotalLoss=0.00444, PSNR=26.3]
Train epoch 1/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.82it/s, TotalLoss=0.00444, PSNR=26.3]
Train epoch 1/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.82it/s, TotalLoss=0.00444, PSNR=26.3]
Train epoch 1/10: 81%|████████▏ | 26/32 [00:15<00:03, 1.82it/s, TotalLoss=0.00444, PSNR=26.3]
Train epoch 1/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.77it/s, TotalLoss=0.00444, PSNR=26.3]
Train epoch 1/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.77it/s, TotalLoss=0.00444, PSNR=26.3]
Train epoch 1/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.77it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.79it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.79it/s, TotalLoss=0.00445, PSNR=26.3]
Train epoch 1/10: 88%|████████▊ | 28/32 [00:16<00:02, 1.79it/s, TotalLoss=0.00439, PSNR=26.3]
Train epoch 1/10: 91%|█████████ | 29/32 [00:16<00:01, 1.81it/s, TotalLoss=0.00439, PSNR=26.3]
Train epoch 1/10: 91%|█████████ | 29/32 [00:16<00:01, 1.81it/s, TotalLoss=0.00439, PSNR=26.3]
Train epoch 1/10: 91%|█████████ | 29/32 [00:16<00:01, 1.81it/s, TotalLoss=0.00441, PSNR=26.3]
Train epoch 1/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.82it/s, TotalLoss=0.00441, PSNR=26.3]
Train epoch 1/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.82it/s, TotalLoss=0.00441, PSNR=26.3]
Train epoch 1/10: 94%|█████████▍| 30/32 [00:17<00:01, 1.82it/s, TotalLoss=0.00438, PSNR=26.4]
Train epoch 1/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.82it/s, TotalLoss=0.00438, PSNR=26.4]
Train epoch 1/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.82it/s, TotalLoss=0.00438, PSNR=26.4]
Train epoch 1/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.82it/s, TotalLoss=0.00433, PSNR=26.4]
Train epoch 1/10: 100%|██████████| 32/32 [00:18<00:00, 1.47it/s, TotalLoss=0.00433, PSNR=26.4]
Train epoch 1/10: 100%|██████████| 32/32 [00:18<00:00, 1.76it/s, TotalLoss=0.00433, PSNR=26.4]
0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 1/10: 0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 1/10: 0%| | 0/1 [00:00<?, ?it/s, PSNR=20.2]
Eval epoch 1/10: 100%|██████████| 1/1 [00:00<00:00, 5.47it/s, PSNR=20.2]
Eval epoch 1/10: 100%|██████████| 1/1 [00:00<00:00, 5.45it/s, PSNR=20.2]
Best model saved at epoch 1
0%| | 0/32 [00:00<?, ?it/s]
Train epoch 2/10: 0%| | 0/32 [00:00<?, ?it/s]
Train epoch 2/10: 0%| | 0/32 [00:00<?, ?it/s, TotalLoss=0.00481, PSNR=25]
Train epoch 2/10: 3%|▎ | 1/32 [00:00<00:17, 1.79it/s, TotalLoss=0.00481, PSNR=25]
Train epoch 2/10: 3%|▎ | 1/32 [00:00<00:17, 1.79it/s, TotalLoss=0.00481, PSNR=25]
Train epoch 2/10: 3%|▎ | 1/32 [00:01<00:17, 1.79it/s, TotalLoss=0.00503, PSNR=24.9]
Train epoch 2/10: 6%|▋ | 2/32 [00:01<00:16, 1.80it/s, TotalLoss=0.00503, PSNR=24.9]
Train epoch 2/10: 6%|▋ | 2/32 [00:01<00:16, 1.80it/s, TotalLoss=0.00503, PSNR=24.9]
Train epoch 2/10: 6%|▋ | 2/32 [00:01<00:16, 1.80it/s, TotalLoss=0.00468, PSNR=25.2]
Train epoch 2/10: 9%|▉ | 3/32 [00:01<00:15, 1.81it/s, TotalLoss=0.00468, PSNR=25.2]
Train epoch 2/10: 9%|▉ | 3/32 [00:01<00:15, 1.81it/s, TotalLoss=0.00468, PSNR=25.2]
Train epoch 2/10: 9%|▉ | 3/32 [00:02<00:15, 1.81it/s, TotalLoss=0.00452, PSNR=25.5]
Train epoch 2/10: 12%|█▎ | 4/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00452, PSNR=25.5]
Train epoch 2/10: 12%|█▎ | 4/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00452, PSNR=25.5]
Train epoch 2/10: 12%|█▎ | 4/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00422, PSNR=26.1]
Train epoch 2/10: 16%|█▌ | 5/32 [00:02<00:14, 1.83it/s, TotalLoss=0.00422, PSNR=26.1]
Train epoch 2/10: 16%|█▌ | 5/32 [00:02<00:14, 1.83it/s, TotalLoss=0.00422, PSNR=26.1]
Train epoch 2/10: 16%|█▌ | 5/32 [00:03<00:14, 1.83it/s, TotalLoss=0.00417, PSNR=26.2]
Train epoch 2/10: 19%|█▉ | 6/32 [00:03<00:14, 1.83it/s, TotalLoss=0.00417, PSNR=26.2]
Train epoch 2/10: 19%|█▉ | 6/32 [00:03<00:14, 1.83it/s, TotalLoss=0.00417, PSNR=26.2]
Train epoch 2/10: 19%|█▉ | 6/32 [00:03<00:14, 1.83it/s, TotalLoss=0.00416, PSNR=26.2]
Train epoch 2/10: 22%|██▏ | 7/32 [00:03<00:13, 1.84it/s, TotalLoss=0.00416, PSNR=26.2]
Train epoch 2/10: 22%|██▏ | 7/32 [00:03<00:13, 1.84it/s, TotalLoss=0.00416, PSNR=26.2]
Train epoch 2/10: 22%|██▏ | 7/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00432, PSNR=26]
Train epoch 2/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00432, PSNR=26]
Train epoch 2/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00432, PSNR=26]
Train epoch 2/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00425, PSNR=26.1]
Train epoch 2/10: 28%|██▊ | 9/32 [00:04<00:12, 1.85it/s, TotalLoss=0.00425, PSNR=26.1]
Train epoch 2/10: 28%|██▊ | 9/32 [00:04<00:12, 1.85it/s, TotalLoss=0.00425, PSNR=26.1]
Train epoch 2/10: 28%|██▊ | 9/32 [00:05<00:12, 1.85it/s, TotalLoss=0.00436, PSNR=26]
Train epoch 2/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00436, PSNR=26]
Train epoch 2/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00436, PSNR=26]
Train epoch 2/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.0044, PSNR=26]
Train epoch 2/10: 34%|███▍ | 11/32 [00:06<00:11, 1.83it/s, TotalLoss=0.0044, PSNR=26]
Train epoch 2/10: 34%|███▍ | 11/32 [00:06<00:11, 1.83it/s, TotalLoss=0.0044, PSNR=26]
Train epoch 2/10: 34%|███▍ | 11/32 [00:06<00:11, 1.83it/s, TotalLoss=0.0043, PSNR=26.2]
Train epoch 2/10: 38%|███▊ | 12/32 [00:06<00:10, 1.83it/s, TotalLoss=0.0043, PSNR=26.2]
Train epoch 2/10: 38%|███▊ | 12/32 [00:06<00:10, 1.83it/s, TotalLoss=0.0043, PSNR=26.2]
Train epoch 2/10: 38%|███▊ | 12/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00433, PSNR=26.2]
Train epoch 2/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00433, PSNR=26.2]
Train epoch 2/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00433, PSNR=26.2]
Train epoch 2/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00431, PSNR=26.2]
Train epoch 2/10: 44%|████▍ | 14/32 [00:07<00:09, 1.83it/s, TotalLoss=0.00431, PSNR=26.2]
Train epoch 2/10: 44%|████▍ | 14/32 [00:07<00:09, 1.83it/s, TotalLoss=0.00431, PSNR=26.2]
Train epoch 2/10: 44%|████▍ | 14/32 [00:08<00:09, 1.83it/s, TotalLoss=0.00429, PSNR=26.2]
Train epoch 2/10: 47%|████▋ | 15/32 [00:08<00:09, 1.83it/s, TotalLoss=0.00429, PSNR=26.2]
Train epoch 2/10: 47%|████▋ | 15/32 [00:08<00:09, 1.83it/s, TotalLoss=0.00429, PSNR=26.2]
Train epoch 2/10: 47%|████▋ | 15/32 [00:08<00:09, 1.83it/s, TotalLoss=0.00427, PSNR=26.3]
Train epoch 2/10: 50%|█████ | 16/32 [00:08<00:08, 1.82it/s, TotalLoss=0.00427, PSNR=26.3]
Train epoch 2/10: 50%|█████ | 16/32 [00:08<00:08, 1.82it/s, TotalLoss=0.00427, PSNR=26.3]
Train epoch 2/10: 50%|█████ | 16/32 [00:09<00:08, 1.82it/s, TotalLoss=0.00428, PSNR=26.4]
Train epoch 2/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.81it/s, TotalLoss=0.00428, PSNR=26.4]
Train epoch 2/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.81it/s, TotalLoss=0.00428, PSNR=26.4]
Train epoch 2/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.81it/s, TotalLoss=0.00429, PSNR=26.3]
Train epoch 2/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.80it/s, TotalLoss=0.00429, PSNR=26.3]
Train epoch 2/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.80it/s, TotalLoss=0.00429, PSNR=26.3]
Train epoch 2/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.80it/s, TotalLoss=0.00427, PSNR=26.4]
Train epoch 2/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.80it/s, TotalLoss=0.00427, PSNR=26.4]
Train epoch 2/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.80it/s, TotalLoss=0.00427, PSNR=26.4]
Train epoch 2/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.80it/s, TotalLoss=0.00427, PSNR=26.4]
Train epoch 2/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.81it/s, TotalLoss=0.00427, PSNR=26.4]
Train epoch 2/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.81it/s, TotalLoss=0.00427, PSNR=26.4]
Train epoch 2/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.81it/s, TotalLoss=0.00419, PSNR=26.5]
Train epoch 2/10: 66%|██████▌ | 21/32 [00:11<00:06, 1.81it/s, TotalLoss=0.00419, PSNR=26.5]
Train epoch 2/10: 66%|██████▌ | 21/32 [00:11<00:06, 1.81it/s, TotalLoss=0.00419, PSNR=26.5]
Train epoch 2/10: 66%|██████▌ | 21/32 [00:12<00:06, 1.81it/s, TotalLoss=0.00423, PSNR=26.5]
Train epoch 2/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.82it/s, TotalLoss=0.00423, PSNR=26.5]
Train epoch 2/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.82it/s, TotalLoss=0.00423, PSNR=26.5]
Train epoch 2/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.82it/s, TotalLoss=0.00424, PSNR=26.5]
Train epoch 2/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.82it/s, TotalLoss=0.00424, PSNR=26.5]
Train epoch 2/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.82it/s, TotalLoss=0.00424, PSNR=26.5]
Train epoch 2/10: 72%|███████▏ | 23/32 [00:13<00:04, 1.82it/s, TotalLoss=0.00422, PSNR=26.5]
Train epoch 2/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.83it/s, TotalLoss=0.00422, PSNR=26.5]
Train epoch 2/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.83it/s, TotalLoss=0.00422, PSNR=26.5]
Train epoch 2/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.83it/s, TotalLoss=0.00425, PSNR=26.4]
Train epoch 2/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.83it/s, TotalLoss=0.00425, PSNR=26.4]
Train epoch 2/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.83it/s, TotalLoss=0.00425, PSNR=26.4]
Train epoch 2/10: 78%|███████▊ | 25/32 [00:14<00:03, 1.83it/s, TotalLoss=0.00428, PSNR=26.4]
Train epoch 2/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.83it/s, TotalLoss=0.00428, PSNR=26.4]
Train epoch 2/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.83it/s, TotalLoss=0.00428, PSNR=26.4]
Train epoch 2/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.83it/s, TotalLoss=0.00425, PSNR=26.4]
Train epoch 2/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.84it/s, TotalLoss=0.00425, PSNR=26.4]
Train epoch 2/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.84it/s, TotalLoss=0.00425, PSNR=26.4]
Train epoch 2/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.84it/s, TotalLoss=0.00429, PSNR=26.4]
Train epoch 2/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.84it/s, TotalLoss=0.00429, PSNR=26.4]
Train epoch 2/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.84it/s, TotalLoss=0.00429, PSNR=26.4]
Train epoch 2/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.84it/s, TotalLoss=0.00426, PSNR=26.5]
Train epoch 2/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.00426, PSNR=26.5]
Train epoch 2/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.00426, PSNR=26.5]
Train epoch 2/10: 91%|█████████ | 29/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00425, PSNR=26.5]
Train epoch 2/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.80it/s, TotalLoss=0.00425, PSNR=26.5]
Train epoch 2/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.80it/s, TotalLoss=0.00425, PSNR=26.5]
Train epoch 2/10: 94%|█████████▍| 30/32 [00:17<00:01, 1.80it/s, TotalLoss=0.00425, PSNR=26.5]
Train epoch 2/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.78it/s, TotalLoss=0.00425, PSNR=26.5]
Train epoch 2/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.78it/s, TotalLoss=0.00425, PSNR=26.5]
Train epoch 2/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.78it/s, TotalLoss=0.00421, PSNR=26.5]
Train epoch 2/10: 100%|██████████| 32/32 [00:18<00:00, 1.36it/s, TotalLoss=0.00421, PSNR=26.5]
Train epoch 2/10: 100%|██████████| 32/32 [00:18<00:00, 1.76it/s, TotalLoss=0.00421, PSNR=26.5]
0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 2/10: 0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 2/10: 0%| | 0/1 [00:00<?, ?it/s, PSNR=20.4]
Eval epoch 2/10: 100%|██████████| 1/1 [00:00<00:00, 6.18it/s, PSNR=20.4]
Eval epoch 2/10: 100%|██████████| 1/1 [00:00<00:00, 6.16it/s, PSNR=20.4]
Best model saved at epoch 2
0%| | 0/32 [00:00<?, ?it/s]
Train epoch 3/10: 0%| | 0/32 [00:00<?, ?it/s]
Train epoch 3/10: 0%| | 0/32 [00:00<?, ?it/s, TotalLoss=0.00446, PSNR=25.9]
Train epoch 3/10: 3%|▎ | 1/32 [00:00<00:17, 1.77it/s, TotalLoss=0.00446, PSNR=25.9]
Train epoch 3/10: 3%|▎ | 1/32 [00:00<00:17, 1.77it/s, TotalLoss=0.00446, PSNR=25.9]
Train epoch 3/10: 3%|▎ | 1/32 [00:01<00:17, 1.77it/s, TotalLoss=0.00408, PSNR=26.4]
Train epoch 3/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.00408, PSNR=26.4]
Train epoch 3/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.00408, PSNR=26.4]
Train epoch 3/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.0042, PSNR=26.3]
Train epoch 3/10: 9%|▉ | 3/32 [00:01<00:15, 1.82it/s, TotalLoss=0.0042, PSNR=26.3]
Train epoch 3/10: 9%|▉ | 3/32 [00:01<00:15, 1.82it/s, TotalLoss=0.0042, PSNR=26.3]
Train epoch 3/10: 9%|▉ | 3/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00422, PSNR=26.4]
Train epoch 3/10: 12%|█▎ | 4/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00422, PSNR=26.4]
Train epoch 3/10: 12%|█▎ | 4/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00422, PSNR=26.4]
Train epoch 3/10: 12%|█▎ | 4/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00431, PSNR=26.3]
Train epoch 3/10: 16%|█▌ | 5/32 [00:02<00:14, 1.83it/s, TotalLoss=0.00431, PSNR=26.3]
Train epoch 3/10: 16%|█▌ | 5/32 [00:02<00:14, 1.83it/s, TotalLoss=0.00431, PSNR=26.3]
Train epoch 3/10: 16%|█▌ | 5/32 [00:03<00:14, 1.83it/s, TotalLoss=0.00436, PSNR=26.2]
Train epoch 3/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00436, PSNR=26.2]
Train epoch 3/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00436, PSNR=26.2]
Train epoch 3/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00431, PSNR=26.3]
Train epoch 3/10: 22%|██▏ | 7/32 [00:03<00:13, 1.84it/s, TotalLoss=0.00431, PSNR=26.3]
Train epoch 3/10: 22%|██▏ | 7/32 [00:03<00:13, 1.84it/s, TotalLoss=0.00431, PSNR=26.3]
Train epoch 3/10: 22%|██▏ | 7/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00427, PSNR=26.4]
Train epoch 3/10: 25%|██▌ | 8/32 [00:04<00:13, 1.83it/s, TotalLoss=0.00427, PSNR=26.4]
Train epoch 3/10: 25%|██▌ | 8/32 [00:04<00:13, 1.83it/s, TotalLoss=0.00427, PSNR=26.4]
Train epoch 3/10: 25%|██▌ | 8/32 [00:04<00:13, 1.83it/s, TotalLoss=0.00439, PSNR=26.4]
Train epoch 3/10: 28%|██▊ | 9/32 [00:04<00:12, 1.84it/s, TotalLoss=0.00439, PSNR=26.4]
Train epoch 3/10: 28%|██▊ | 9/32 [00:04<00:12, 1.84it/s, TotalLoss=0.00439, PSNR=26.4]
Train epoch 3/10: 28%|██▊ | 9/32 [00:05<00:12, 1.84it/s, TotalLoss=0.00429, PSNR=26.4]
Train epoch 3/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00429, PSNR=26.4]
Train epoch 3/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00429, PSNR=26.4]
Train epoch 3/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00421, PSNR=26.4]
Train epoch 3/10: 34%|███▍ | 11/32 [00:06<00:11, 1.83it/s, TotalLoss=0.00421, PSNR=26.4]
Train epoch 3/10: 34%|███▍ | 11/32 [00:06<00:11, 1.83it/s, TotalLoss=0.00421, PSNR=26.4]
Train epoch 3/10: 34%|███▍ | 11/32 [00:06<00:11, 1.83it/s, TotalLoss=0.00424, PSNR=26.4]
Train epoch 3/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00424, PSNR=26.4]
Train epoch 3/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00424, PSNR=26.4]
Train epoch 3/10: 38%|███▊ | 12/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00424, PSNR=26.4]
Train epoch 3/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00424, PSNR=26.4]
Train epoch 3/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00424, PSNR=26.4]
Train epoch 3/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00408, PSNR=26.6]
Train epoch 3/10: 44%|████▍ | 14/32 [00:07<00:09, 1.83it/s, TotalLoss=0.00408, PSNR=26.6]
Train epoch 3/10: 44%|████▍ | 14/32 [00:07<00:09, 1.83it/s, TotalLoss=0.00408, PSNR=26.6]
Train epoch 3/10: 44%|████▍ | 14/32 [00:08<00:09, 1.83it/s, TotalLoss=0.00404, PSNR=26.6]
Train epoch 3/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00404, PSNR=26.6]
Train epoch 3/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00404, PSNR=26.6]
Train epoch 3/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00403, PSNR=26.6]
Train epoch 3/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00403, PSNR=26.6]
Train epoch 3/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00403, PSNR=26.6]
Train epoch 3/10: 50%|█████ | 16/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00408, PSNR=26.5]
Train epoch 3/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00408, PSNR=26.5]
Train epoch 3/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00408, PSNR=26.5]
Train epoch 3/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.0042, PSNR=26.3]
Train epoch 3/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.0042, PSNR=26.3]
Train epoch 3/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.0042, PSNR=26.3]
Train epoch 3/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00418, PSNR=26.3]
Train epoch 3/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.80it/s, TotalLoss=0.00418, PSNR=26.3]
Train epoch 3/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.80it/s, TotalLoss=0.00418, PSNR=26.3]
Train epoch 3/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.80it/s, TotalLoss=0.00428, PSNR=26.2]
Train epoch 3/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.81it/s, TotalLoss=0.00428, PSNR=26.2]
Train epoch 3/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.81it/s, TotalLoss=0.00428, PSNR=26.2]
Train epoch 3/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.81it/s, TotalLoss=0.00433, PSNR=26.1]
Train epoch 3/10: 66%|██████▌ | 21/32 [00:11<00:06, 1.82it/s, TotalLoss=0.00433, PSNR=26.1]
Train epoch 3/10: 66%|██████▌ | 21/32 [00:11<00:06, 1.82it/s, TotalLoss=0.00433, PSNR=26.1]
Train epoch 3/10: 66%|██████▌ | 21/32 [00:12<00:06, 1.82it/s, TotalLoss=0.00431, PSNR=26.1]
Train epoch 3/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.83it/s, TotalLoss=0.00431, PSNR=26.1]
Train epoch 3/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.83it/s, TotalLoss=0.00431, PSNR=26.1]
Train epoch 3/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.83it/s, TotalLoss=0.00432, PSNR=26]
Train epoch 3/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.83it/s, TotalLoss=0.00432, PSNR=26]
Train epoch 3/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.83it/s, TotalLoss=0.00432, PSNR=26]
Train epoch 3/10: 72%|███████▏ | 23/32 [00:13<00:04, 1.83it/s, TotalLoss=0.00434, PSNR=26]
Train epoch 3/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.83it/s, TotalLoss=0.00434, PSNR=26]
Train epoch 3/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.83it/s, TotalLoss=0.00434, PSNR=26]
Train epoch 3/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.83it/s, TotalLoss=0.00435, PSNR=26]
Train epoch 3/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.84it/s, TotalLoss=0.00435, PSNR=26]
Train epoch 3/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.84it/s, TotalLoss=0.00435, PSNR=26]
Train epoch 3/10: 78%|███████▊ | 25/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00436, PSNR=26]
Train epoch 3/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00436, PSNR=26]
Train epoch 3/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00436, PSNR=26]
Train epoch 3/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00434, PSNR=26]
Train epoch 3/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.84it/s, TotalLoss=0.00434, PSNR=26]
Train epoch 3/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.84it/s, TotalLoss=0.00434, PSNR=26]
Train epoch 3/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.84it/s, TotalLoss=0.0044, PSNR=25.9]
Train epoch 3/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.84it/s, TotalLoss=0.0044, PSNR=25.9]
Train epoch 3/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.84it/s, TotalLoss=0.0044, PSNR=25.9]
Train epoch 3/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.84it/s, TotalLoss=0.0044, PSNR=25.9]
Train epoch 3/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.0044, PSNR=25.9]
Train epoch 3/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.0044, PSNR=25.9]
Train epoch 3/10: 91%|█████████ | 29/32 [00:16<00:01, 1.84it/s, TotalLoss=0.0044, PSNR=25.9]
Train epoch 3/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.0044, PSNR=25.9]
Train epoch 3/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.0044, PSNR=25.9]
Train epoch 3/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00438, PSNR=25.9]
Train epoch 3/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.84it/s, TotalLoss=0.00438, PSNR=25.9]
Train epoch 3/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.84it/s, TotalLoss=0.00438, PSNR=25.9]
Train epoch 3/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.84it/s, TotalLoss=0.00439, PSNR=25.9]
Train epoch 3/10: 100%|██████████| 32/32 [00:18<00:00, 1.37it/s, TotalLoss=0.00439, PSNR=25.9]
Train epoch 3/10: 100%|██████████| 32/32 [00:18<00:00, 1.77it/s, TotalLoss=0.00439, PSNR=25.9]
0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 3/10: 0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 3/10: 0%| | 0/1 [00:00<?, ?it/s, PSNR=20]
Eval epoch 3/10: 100%|██████████| 1/1 [00:00<00:00, 6.36it/s, PSNR=20]
Eval epoch 3/10: 100%|██████████| 1/1 [00:00<00:00, 6.34it/s, PSNR=20]
0%| | 0/32 [00:00<?, ?it/s]
Train epoch 4/10: 0%| | 0/32 [00:00<?, ?it/s]
Train epoch 4/10: 0%| | 0/32 [00:00<?, ?it/s, TotalLoss=0.00484, PSNR=24.5]
Train epoch 4/10: 3%|▎ | 1/32 [00:00<00:17, 1.78it/s, TotalLoss=0.00484, PSNR=24.5]
Train epoch 4/10: 3%|▎ | 1/32 [00:00<00:17, 1.78it/s, TotalLoss=0.00484, PSNR=24.5]
Train epoch 4/10: 3%|▎ | 1/32 [00:01<00:17, 1.78it/s, TotalLoss=0.00494, PSNR=24.6]
Train epoch 4/10: 6%|▋ | 2/32 [00:01<00:16, 1.82it/s, TotalLoss=0.00494, PSNR=24.6]
Train epoch 4/10: 6%|▋ | 2/32 [00:01<00:16, 1.82it/s, TotalLoss=0.00494, PSNR=24.6]
Train epoch 4/10: 6%|▋ | 2/32 [00:01<00:16, 1.82it/s, TotalLoss=0.00487, PSNR=24.8]
Train epoch 4/10: 9%|▉ | 3/32 [00:01<00:15, 1.83it/s, TotalLoss=0.00487, PSNR=24.8]
Train epoch 4/10: 9%|▉ | 3/32 [00:01<00:15, 1.83it/s, TotalLoss=0.00487, PSNR=24.8]
Train epoch 4/10: 9%|▉ | 3/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00495, PSNR=24.8]
Train epoch 4/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00495, PSNR=24.8]
Train epoch 4/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00495, PSNR=24.8]
Train epoch 4/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00478, PSNR=25.2]
Train epoch 4/10: 16%|█▌ | 5/32 [00:02<00:14, 1.84it/s, TotalLoss=0.00478, PSNR=25.2]
Train epoch 4/10: 16%|█▌ | 5/32 [00:02<00:14, 1.84it/s, TotalLoss=0.00478, PSNR=25.2]
Train epoch 4/10: 16%|█▌ | 5/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00454, PSNR=25.5]
Train epoch 4/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00454, PSNR=25.5]
Train epoch 4/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00454, PSNR=25.5]
Train epoch 4/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00446, PSNR=25.5]
Train epoch 4/10: 22%|██▏ | 7/32 [00:03<00:13, 1.85it/s, TotalLoss=0.00446, PSNR=25.5]
Train epoch 4/10: 22%|██▏ | 7/32 [00:03<00:13, 1.85it/s, TotalLoss=0.00446, PSNR=25.5]
Train epoch 4/10: 22%|██▏ | 7/32 [00:04<00:13, 1.85it/s, TotalLoss=0.0045, PSNR=25.5]
Train epoch 4/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.0045, PSNR=25.5]
Train epoch 4/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.0045, PSNR=25.5]
Train epoch 4/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00446, PSNR=25.6]
Train epoch 4/10: 28%|██▊ | 9/32 [00:04<00:12, 1.84it/s, TotalLoss=0.00446, PSNR=25.6]
Train epoch 4/10: 28%|██▊ | 9/32 [00:04<00:12, 1.84it/s, TotalLoss=0.00446, PSNR=25.6]
Train epoch 4/10: 28%|██▊ | 9/32 [00:05<00:12, 1.84it/s, TotalLoss=0.00445, PSNR=25.6]
Train epoch 4/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00445, PSNR=25.6]
Train epoch 4/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00445, PSNR=25.6]
Train epoch 4/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00439, PSNR=25.7]
Train epoch 4/10: 34%|███▍ | 11/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00439, PSNR=25.7]
Train epoch 4/10: 34%|███▍ | 11/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00439, PSNR=25.7]
Train epoch 4/10: 34%|███▍ | 11/32 [00:06<00:11, 1.85it/s, TotalLoss=0.00444, PSNR=25.6]
Train epoch 4/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00444, PSNR=25.6]
Train epoch 4/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00444, PSNR=25.6]
Train epoch 4/10: 38%|███▊ | 12/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00441, PSNR=25.6]
Train epoch 4/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00441, PSNR=25.6]
Train epoch 4/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00441, PSNR=25.6]
Train epoch 4/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00447, PSNR=25.5]
Train epoch 4/10: 44%|████▍ | 14/32 [00:07<00:09, 1.84it/s, TotalLoss=0.00447, PSNR=25.5]
Train epoch 4/10: 44%|████▍ | 14/32 [00:07<00:09, 1.84it/s, TotalLoss=0.00447, PSNR=25.5]
Train epoch 4/10: 44%|████▍ | 14/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00453, PSNR=25.4]
Train epoch 4/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00453, PSNR=25.4]
Train epoch 4/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00453, PSNR=25.4]
Train epoch 4/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00449, PSNR=25.4]
Train epoch 4/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00449, PSNR=25.4]
Train epoch 4/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00449, PSNR=25.4]
Train epoch 4/10: 50%|█████ | 16/32 [00:09<00:08, 1.84it/s, TotalLoss=0.0045, PSNR=25.4]
Train epoch 4/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.80it/s, TotalLoss=0.0045, PSNR=25.4]
Train epoch 4/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.80it/s, TotalLoss=0.0045, PSNR=25.4]
Train epoch 4/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.80it/s, TotalLoss=0.00447, PSNR=25.4]
Train epoch 4/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.81it/s, TotalLoss=0.00447, PSNR=25.4]
Train epoch 4/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.81it/s, TotalLoss=0.00447, PSNR=25.4]
Train epoch 4/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.81it/s, TotalLoss=0.00444, PSNR=25.4]
Train epoch 4/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.82it/s, TotalLoss=0.00444, PSNR=25.4]
Train epoch 4/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.82it/s, TotalLoss=0.00444, PSNR=25.4]
Train epoch 4/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.82it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.83it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.83it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.83it/s, TotalLoss=0.00442, PSNR=25.5]
Train epoch 4/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00442, PSNR=25.5]
Train epoch 4/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00442, PSNR=25.5]
Train epoch 4/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00447, PSNR=25.5]
Train epoch 4/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.83it/s, TotalLoss=0.00447, PSNR=25.5]
Train epoch 4/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.83it/s, TotalLoss=0.00447, PSNR=25.5]
Train epoch 4/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.83it/s, TotalLoss=0.00447, PSNR=25.5]
Train epoch 4/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.84it/s, TotalLoss=0.00447, PSNR=25.5]
Train epoch 4/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.84it/s, TotalLoss=0.00447, PSNR=25.5]
Train epoch 4/10: 72%|███████▏ | 23/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00443, PSNR=25.5]
Train epoch 4/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.84it/s, TotalLoss=0.00443, PSNR=25.5]
Train epoch 4/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.84it/s, TotalLoss=0.00443, PSNR=25.5]
Train epoch 4/10: 78%|███████▊ | 25/32 [00:14<00:03, 1.84it/s, TotalLoss=0.0044, PSNR=25.5]
Train epoch 4/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.85it/s, TotalLoss=0.0044, PSNR=25.5]
Train epoch 4/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.85it/s, TotalLoss=0.0044, PSNR=25.5]
Train epoch 4/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.85it/s, TotalLoss=0.0044, PSNR=25.5]
Train epoch 4/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.79it/s, TotalLoss=0.0044, PSNR=25.5]
Train epoch 4/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.79it/s, TotalLoss=0.0044, PSNR=25.5]
Train epoch 4/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.79it/s, TotalLoss=0.00443, PSNR=25.5]
Train epoch 4/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.81it/s, TotalLoss=0.00443, PSNR=25.5]
Train epoch 4/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.81it/s, TotalLoss=0.00443, PSNR=25.5]
Train epoch 4/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.81it/s, TotalLoss=0.00442, PSNR=25.5]
Train epoch 4/10: 91%|█████████ | 29/32 [00:15<00:01, 1.82it/s, TotalLoss=0.00442, PSNR=25.5]
Train epoch 4/10: 91%|█████████ | 29/32 [00:15<00:01, 1.82it/s, TotalLoss=0.00442, PSNR=25.5]
Train epoch 4/10: 91%|█████████ | 29/32 [00:16<00:01, 1.82it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.83it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.83it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.83it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.83it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.83it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.83it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 100%|██████████| 32/32 [00:18<00:00, 1.38it/s, TotalLoss=0.00445, PSNR=25.5]
Train epoch 4/10: 100%|██████████| 32/32 [00:18<00:00, 1.77it/s, TotalLoss=0.00445, PSNR=25.5]
0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 4/10: 0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 4/10: 0%| | 0/1 [00:00<?, ?it/s, PSNR=20.2]
Eval epoch 4/10: 100%|██████████| 1/1 [00:00<00:00, 6.53it/s, PSNR=20.2]
Eval epoch 4/10: 100%|██████████| 1/1 [00:00<00:00, 6.51it/s, PSNR=20.2]
0%| | 0/32 [00:00<?, ?it/s]
Train epoch 5/10: 0%| | 0/32 [00:00<?, ?it/s]
Train epoch 5/10: 0%| | 0/32 [00:00<?, ?it/s, TotalLoss=0.00366, PSNR=25.5]
Train epoch 5/10: 3%|▎ | 1/32 [00:00<00:17, 1.78it/s, TotalLoss=0.00366, PSNR=25.5]
Train epoch 5/10: 3%|▎ | 1/32 [00:00<00:17, 1.78it/s, TotalLoss=0.00366, PSNR=25.5]
Train epoch 5/10: 3%|▎ | 1/32 [00:01<00:17, 1.78it/s, TotalLoss=0.00416, PSNR=25.4]
Train epoch 5/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.00416, PSNR=25.4]
Train epoch 5/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.00416, PSNR=25.4]
Train epoch 5/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.00447, PSNR=25.2]
Train epoch 5/10: 9%|▉ | 3/32 [00:01<00:15, 1.83it/s, TotalLoss=0.00447, PSNR=25.2]
Train epoch 5/10: 9%|▉ | 3/32 [00:01<00:15, 1.83it/s, TotalLoss=0.00447, PSNR=25.2]
Train epoch 5/10: 9%|▉ | 3/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00458, PSNR=25.3]
Train epoch 5/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00458, PSNR=25.3]
Train epoch 5/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00458, PSNR=25.3]
Train epoch 5/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00454, PSNR=25.3]
Train epoch 5/10: 16%|█▌ | 5/32 [00:02<00:14, 1.84it/s, TotalLoss=0.00454, PSNR=25.3]
Train epoch 5/10: 16%|█▌ | 5/32 [00:02<00:14, 1.84it/s, TotalLoss=0.00454, PSNR=25.3]
Train epoch 5/10: 16%|█▌ | 5/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00445, PSNR=25.3]
Train epoch 5/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00445, PSNR=25.3]
Train epoch 5/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00445, PSNR=25.3]
Train epoch 5/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00436, PSNR=25.3]
Train epoch 5/10: 22%|██▏ | 7/32 [00:03<00:13, 1.85it/s, TotalLoss=0.00436, PSNR=25.3]
Train epoch 5/10: 22%|██▏ | 7/32 [00:03<00:13, 1.85it/s, TotalLoss=0.00436, PSNR=25.3]
Train epoch 5/10: 22%|██▏ | 7/32 [00:04<00:13, 1.85it/s, TotalLoss=0.00429, PSNR=25.5]
Train epoch 5/10: 25%|██▌ | 8/32 [00:04<00:13, 1.85it/s, TotalLoss=0.00429, PSNR=25.5]
Train epoch 5/10: 25%|██▌ | 8/32 [00:04<00:13, 1.85it/s, TotalLoss=0.00429, PSNR=25.5]
Train epoch 5/10: 25%|██▌ | 8/32 [00:04<00:13, 1.85it/s, TotalLoss=0.0044, PSNR=25.5]
Train epoch 5/10: 28%|██▊ | 9/32 [00:04<00:12, 1.85it/s, TotalLoss=0.0044, PSNR=25.5]
Train epoch 5/10: 28%|██▊ | 9/32 [00:04<00:12, 1.85it/s, TotalLoss=0.0044, PSNR=25.5]
Train epoch 5/10: 28%|██▊ | 9/32 [00:05<00:12, 1.85it/s, TotalLoss=0.00442, PSNR=25.5]
Train epoch 5/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00442, PSNR=25.5]
Train epoch 5/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00442, PSNR=25.5]
Train epoch 5/10: 31%|███▏ | 10/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00444, PSNR=25.5]
Train epoch 5/10: 34%|███▍ | 11/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00444, PSNR=25.5]
Train epoch 5/10: 34%|███▍ | 11/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00444, PSNR=25.5]
Train epoch 5/10: 34%|███▍ | 11/32 [00:06<00:11, 1.84it/s, TotalLoss=0.00433, PSNR=25.6]
Train epoch 5/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00433, PSNR=25.6]
Train epoch 5/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00433, PSNR=25.6]
Train epoch 5/10: 38%|███▊ | 12/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00427, PSNR=25.6]
Train epoch 5/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00427, PSNR=25.6]
Train epoch 5/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00427, PSNR=25.6]
Train epoch 5/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00428, PSNR=25.6]
Train epoch 5/10: 44%|████▍ | 14/32 [00:07<00:09, 1.84it/s, TotalLoss=0.00428, PSNR=25.6]
Train epoch 5/10: 44%|████▍ | 14/32 [00:07<00:09, 1.84it/s, TotalLoss=0.00428, PSNR=25.6]
Train epoch 5/10: 44%|████▍ | 14/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00421, PSNR=25.7]
Train epoch 5/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00421, PSNR=25.7]
Train epoch 5/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00421, PSNR=25.7]
Train epoch 5/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00431, PSNR=25.6]
Train epoch 5/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00431, PSNR=25.6]
Train epoch 5/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00431, PSNR=25.6]
Train epoch 5/10: 50%|█████ | 16/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00443, PSNR=25.5]
Train epoch 5/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00443, PSNR=25.5]
Train epoch 5/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00443, PSNR=25.5]
Train epoch 5/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00441, PSNR=25.5]
Train epoch 5/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.00441, PSNR=25.5]
Train epoch 5/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.00441, PSNR=25.5]
Train epoch 5/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00442, PSNR=25.4]
Train epoch 5/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00442, PSNR=25.4]
Train epoch 5/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00442, PSNR=25.4]
Train epoch 5/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00437, PSNR=25.5]
Train epoch 5/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.85it/s, TotalLoss=0.00437, PSNR=25.5]
Train epoch 5/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.85it/s, TotalLoss=0.00437, PSNR=25.5]
Train epoch 5/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.85it/s, TotalLoss=0.00435, PSNR=25.5]
Train epoch 5/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.85it/s, TotalLoss=0.00435, PSNR=25.5]
Train epoch 5/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.85it/s, TotalLoss=0.00435, PSNR=25.5]
Train epoch 5/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.85it/s, TotalLoss=0.0044, PSNR=25.4]
Train epoch 5/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.85it/s, TotalLoss=0.0044, PSNR=25.4]
Train epoch 5/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.85it/s, TotalLoss=0.0044, PSNR=25.4]
Train epoch 5/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.85it/s, TotalLoss=0.00436, PSNR=25.5]
Train epoch 5/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.85it/s, TotalLoss=0.00436, PSNR=25.5]
Train epoch 5/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.85it/s, TotalLoss=0.00436, PSNR=25.5]
Train epoch 5/10: 72%|███████▏ | 23/32 [00:13<00:04, 1.85it/s, TotalLoss=0.00432, PSNR=25.5]
Train epoch 5/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.85it/s, TotalLoss=0.00432, PSNR=25.5]
Train epoch 5/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.85it/s, TotalLoss=0.00432, PSNR=25.5]
Train epoch 5/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.85it/s, TotalLoss=0.00437, PSNR=25.5]
Train epoch 5/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.85it/s, TotalLoss=0.00437, PSNR=25.5]
Train epoch 5/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.85it/s, TotalLoss=0.00437, PSNR=25.5]
Train epoch 5/10: 78%|███████▊ | 25/32 [00:14<00:03, 1.85it/s, TotalLoss=0.00442, PSNR=25.4]
Train epoch 5/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.85it/s, TotalLoss=0.00442, PSNR=25.4]
Train epoch 5/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.85it/s, TotalLoss=0.00442, PSNR=25.4]
Train epoch 5/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.85it/s, TotalLoss=0.00443, PSNR=25.4]
Train epoch 5/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.85it/s, TotalLoss=0.00443, PSNR=25.4]
Train epoch 5/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.85it/s, TotalLoss=0.00443, PSNR=25.4]
Train epoch 5/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.85it/s, TotalLoss=0.00448, PSNR=25.3]
Train epoch 5/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.85it/s, TotalLoss=0.00448, PSNR=25.3]
Train epoch 5/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.85it/s, TotalLoss=0.00448, PSNR=25.3]
Train epoch 5/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.85it/s, TotalLoss=0.00456, PSNR=25.2]
Train epoch 5/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.00456, PSNR=25.2]
Train epoch 5/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.00456, PSNR=25.2]
Train epoch 5/10: 91%|█████████ | 29/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00457, PSNR=25.2]
Train epoch 5/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00457, PSNR=25.2]
Train epoch 5/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00457, PSNR=25.2]
Train epoch 5/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00458, PSNR=25.1]
Train epoch 5/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.84it/s, TotalLoss=0.00458, PSNR=25.1]
Train epoch 5/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.84it/s, TotalLoss=0.00458, PSNR=25.1]
Train epoch 5/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.84it/s, TotalLoss=0.00461, PSNR=25.1]
Train epoch 5/10: 100%|██████████| 32/32 [00:17<00:00, 1.38it/s, TotalLoss=0.00461, PSNR=25.1]
Train epoch 5/10: 100%|██████████| 32/32 [00:17<00:00, 1.78it/s, TotalLoss=0.00461, PSNR=25.1]
0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 5/10: 0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 5/10: 0%| | 0/1 [00:00<?, ?it/s, PSNR=19.5]
Eval epoch 5/10: 100%|██████████| 1/1 [00:00<00:00, 6.37it/s, PSNR=19.5]
Eval epoch 5/10: 100%|██████████| 1/1 [00:00<00:00, 6.35it/s, PSNR=19.5]
0%| | 0/32 [00:00<?, ?it/s]
Train epoch 6/10: 0%| | 0/32 [00:00<?, ?it/s]
Train epoch 6/10: 0%| | 0/32 [00:00<?, ?it/s, TotalLoss=0.00517, PSNR=24.4]
Train epoch 6/10: 3%|▎ | 1/32 [00:00<00:17, 1.76it/s, TotalLoss=0.00517, PSNR=24.4]
Train epoch 6/10: 3%|▎ | 1/32 [00:00<00:17, 1.76it/s, TotalLoss=0.00517, PSNR=24.4]
Train epoch 6/10: 3%|▎ | 1/32 [00:01<00:17, 1.76it/s, TotalLoss=0.00574, PSNR=23.8]
Train epoch 6/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.00574, PSNR=23.8]
Train epoch 6/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.00574, PSNR=23.8]
Train epoch 6/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.00598, PSNR=23.6]
Train epoch 6/10: 9%|▉ | 3/32 [00:01<00:15, 1.81it/s, TotalLoss=0.00598, PSNR=23.6]
Train epoch 6/10: 9%|▉ | 3/32 [00:01<00:15, 1.81it/s, TotalLoss=0.00598, PSNR=23.6]
Train epoch 6/10: 9%|▉ | 3/32 [00:02<00:15, 1.81it/s, TotalLoss=0.00573, PSNR=23.8]
Train epoch 6/10: 12%|█▎ | 4/32 [00:02<00:15, 1.81it/s, TotalLoss=0.00573, PSNR=23.8]
Train epoch 6/10: 12%|█▎ | 4/32 [00:02<00:15, 1.81it/s, TotalLoss=0.00573, PSNR=23.8]
Train epoch 6/10: 12%|█▎ | 4/32 [00:02<00:15, 1.81it/s, TotalLoss=0.00576, PSNR=23.8]
Train epoch 6/10: 16%|█▌ | 5/32 [00:02<00:14, 1.82it/s, TotalLoss=0.00576, PSNR=23.8]
Train epoch 6/10: 16%|█▌ | 5/32 [00:02<00:14, 1.82it/s, TotalLoss=0.00576, PSNR=23.8]
Train epoch 6/10: 16%|█▌ | 5/32 [00:03<00:14, 1.82it/s, TotalLoss=0.00593, PSNR=23.7]
Train epoch 6/10: 19%|█▉ | 6/32 [00:03<00:14, 1.83it/s, TotalLoss=0.00593, PSNR=23.7]
Train epoch 6/10: 19%|█▉ | 6/32 [00:03<00:14, 1.83it/s, TotalLoss=0.00593, PSNR=23.7]
Train epoch 6/10: 19%|█▉ | 6/32 [00:03<00:14, 1.83it/s, TotalLoss=0.00579, PSNR=23.8]
Train epoch 6/10: 22%|██▏ | 7/32 [00:03<00:13, 1.84it/s, TotalLoss=0.00579, PSNR=23.8]
Train epoch 6/10: 22%|██▏ | 7/32 [00:03<00:13, 1.84it/s, TotalLoss=0.00579, PSNR=23.8]
Train epoch 6/10: 22%|██▏ | 7/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00564, PSNR=23.9]
Train epoch 6/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00564, PSNR=23.9]
Train epoch 6/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00564, PSNR=23.9]
Train epoch 6/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00567, PSNR=23.8]
Train epoch 6/10: 28%|██▊ | 9/32 [00:04<00:12, 1.84it/s, TotalLoss=0.00567, PSNR=23.8]
Train epoch 6/10: 28%|██▊ | 9/32 [00:04<00:12, 1.84it/s, TotalLoss=0.00567, PSNR=23.8]
Train epoch 6/10: 28%|██▊ | 9/32 [00:05<00:12, 1.84it/s, TotalLoss=0.0056, PSNR=23.9]
Train epoch 6/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.0056, PSNR=23.9]
Train epoch 6/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.0056, PSNR=23.9]
Train epoch 6/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00552, PSNR=23.9]
Train epoch 6/10: 34%|███▍ | 11/32 [00:06<00:11, 1.85it/s, TotalLoss=0.00552, PSNR=23.9]
Train epoch 6/10: 34%|███▍ | 11/32 [00:06<00:11, 1.85it/s, TotalLoss=0.00552, PSNR=23.9]
Train epoch 6/10: 34%|███▍ | 11/32 [00:06<00:11, 1.85it/s, TotalLoss=0.00545, PSNR=24]
Train epoch 6/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00545, PSNR=24]
Train epoch 6/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00545, PSNR=24]
Train epoch 6/10: 38%|███▊ | 12/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00539, PSNR=24]
Train epoch 6/10: 41%|████ | 13/32 [00:07<00:10, 1.80it/s, TotalLoss=0.00539, PSNR=24]
Train epoch 6/10: 41%|████ | 13/32 [00:07<00:10, 1.80it/s, TotalLoss=0.00539, PSNR=24]
Train epoch 6/10: 41%|████ | 13/32 [00:07<00:10, 1.80it/s, TotalLoss=0.00528, PSNR=24.1]
Train epoch 6/10: 44%|████▍ | 14/32 [00:07<00:09, 1.81it/s, TotalLoss=0.00528, PSNR=24.1]
Train epoch 6/10: 44%|████▍ | 14/32 [00:07<00:09, 1.81it/s, TotalLoss=0.00528, PSNR=24.1]
Train epoch 6/10: 44%|████▍ | 14/32 [00:08<00:09, 1.81it/s, TotalLoss=0.00534, PSNR=24.1]
Train epoch 6/10: 47%|████▋ | 15/32 [00:08<00:09, 1.82it/s, TotalLoss=0.00534, PSNR=24.1]
Train epoch 6/10: 47%|████▋ | 15/32 [00:08<00:09, 1.82it/s, TotalLoss=0.00534, PSNR=24.1]
Train epoch 6/10: 47%|████▋ | 15/32 [00:08<00:09, 1.82it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 50%|█████ | 16/32 [00:08<00:08, 1.83it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 50%|█████ | 16/32 [00:08<00:08, 1.83it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 50%|█████ | 16/32 [00:09<00:08, 1.83it/s, TotalLoss=0.00534, PSNR=24.2]
Train epoch 6/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.83it/s, TotalLoss=0.00534, PSNR=24.2]
Train epoch 6/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.83it/s, TotalLoss=0.00534, PSNR=24.2]
Train epoch 6/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.83it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.83it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.83it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.83it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00528, PSNR=24.2]
Train epoch 6/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.84it/s, TotalLoss=0.00528, PSNR=24.2]
Train epoch 6/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.84it/s, TotalLoss=0.00528, PSNR=24.2]
Train epoch 6/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.84it/s, TotalLoss=0.00526, PSNR=24.3]
Train epoch 6/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00526, PSNR=24.3]
Train epoch 6/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00526, PSNR=24.3]
Train epoch 6/10: 66%|██████▌ | 21/32 [00:12<00:05, 1.84it/s, TotalLoss=0.00525, PSNR=24.3]
Train epoch 6/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.84it/s, TotalLoss=0.00525, PSNR=24.3]
Train epoch 6/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.84it/s, TotalLoss=0.00525, PSNR=24.3]
Train epoch 6/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.84it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 72%|███████▏ | 23/32 [00:12<00:05, 1.79it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 72%|███████▏ | 23/32 [00:12<00:05, 1.79it/s, TotalLoss=0.00529, PSNR=24.2]
Train epoch 6/10: 72%|███████▏ | 23/32 [00:13<00:05, 1.79it/s, TotalLoss=0.00526, PSNR=24.3]
Train epoch 6/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.81it/s, TotalLoss=0.00526, PSNR=24.3]
Train epoch 6/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.81it/s, TotalLoss=0.00526, PSNR=24.3]
Train epoch 6/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.81it/s, TotalLoss=0.00526, PSNR=24.3]
Train epoch 6/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.82it/s, TotalLoss=0.00526, PSNR=24.3]
Train epoch 6/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.82it/s, TotalLoss=0.00526, PSNR=24.3]
Train epoch 6/10: 78%|███████▊ | 25/32 [00:14<00:03, 1.82it/s, TotalLoss=0.00524, PSNR=24.3]
Train epoch 6/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.83it/s, TotalLoss=0.00524, PSNR=24.3]
Train epoch 6/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.83it/s, TotalLoss=0.00524, PSNR=24.3]
Train epoch 6/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.83it/s, TotalLoss=0.00523, PSNR=24.3]
Train epoch 6/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.83it/s, TotalLoss=0.00523, PSNR=24.3]
Train epoch 6/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.83it/s, TotalLoss=0.00523, PSNR=24.3]
Train epoch 6/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.83it/s, TotalLoss=0.00525, PSNR=24.3]
Train epoch 6/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.82it/s, TotalLoss=0.00525, PSNR=24.3]
Train epoch 6/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.82it/s, TotalLoss=0.00525, PSNR=24.3]
Train epoch 6/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.82it/s, TotalLoss=0.00524, PSNR=24.3]
Train epoch 6/10: 91%|█████████ | 29/32 [00:15<00:01, 1.83it/s, TotalLoss=0.00524, PSNR=24.3]
Train epoch 6/10: 91%|█████████ | 29/32 [00:15<00:01, 1.83it/s, TotalLoss=0.00524, PSNR=24.3]
Train epoch 6/10: 91%|█████████ | 29/32 [00:16<00:01, 1.83it/s, TotalLoss=0.00525, PSNR=24.3]
Train epoch 6/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.81it/s, TotalLoss=0.00525, PSNR=24.3]
Train epoch 6/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.81it/s, TotalLoss=0.00525, PSNR=24.3]
Train epoch 6/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.81it/s, TotalLoss=0.00523, PSNR=24.3]
Train epoch 6/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.82it/s, TotalLoss=0.00523, PSNR=24.3]
Train epoch 6/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.82it/s, TotalLoss=0.00523, PSNR=24.3]
Train epoch 6/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.82it/s, TotalLoss=0.00519, PSNR=24.3]
Train epoch 6/10: 100%|██████████| 32/32 [00:18<00:00, 1.36it/s, TotalLoss=0.00519, PSNR=24.3]
Train epoch 6/10: 100%|██████████| 32/32 [00:18<00:00, 1.76it/s, TotalLoss=0.00519, PSNR=24.3]
0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 6/10: 0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 6/10: 0%| | 0/1 [00:00<?, ?it/s, PSNR=19.8]
Eval epoch 6/10: 100%|██████████| 1/1 [00:00<00:00, 6.29it/s, PSNR=19.8]
Eval epoch 6/10: 100%|██████████| 1/1 [00:00<00:00, 6.27it/s, PSNR=19.8]
0%| | 0/32 [00:00<?, ?it/s]
Train epoch 7/10: 0%| | 0/32 [00:00<?, ?it/s]
Train epoch 7/10: 0%| | 0/32 [00:00<?, ?it/s, TotalLoss=0.00477, PSNR=24.8]
Train epoch 7/10: 3%|▎ | 1/32 [00:00<00:17, 1.77it/s, TotalLoss=0.00477, PSNR=24.8]
Train epoch 7/10: 3%|▎ | 1/32 [00:00<00:17, 1.77it/s, TotalLoss=0.00477, PSNR=24.8]
Train epoch 7/10: 3%|▎ | 1/32 [00:01<00:17, 1.77it/s, TotalLoss=0.00475, PSNR=24.8]
Train epoch 7/10: 6%|▋ | 2/32 [00:01<00:16, 1.82it/s, TotalLoss=0.00475, PSNR=24.8]
Train epoch 7/10: 6%|▋ | 2/32 [00:01<00:16, 1.82it/s, TotalLoss=0.00475, PSNR=24.8]
Train epoch 7/10: 6%|▋ | 2/32 [00:01<00:16, 1.82it/s, TotalLoss=0.00465, PSNR=24.9]
Train epoch 7/10: 9%|▉ | 3/32 [00:01<00:15, 1.83it/s, TotalLoss=0.00465, PSNR=24.9]
Train epoch 7/10: 9%|▉ | 3/32 [00:01<00:15, 1.83it/s, TotalLoss=0.00465, PSNR=24.9]
Train epoch 7/10: 9%|▉ | 3/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00462, PSNR=25]
Train epoch 7/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00462, PSNR=25]
Train epoch 7/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00462, PSNR=25]
Train epoch 7/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00471, PSNR=24.9]
Train epoch 7/10: 16%|█▌ | 5/32 [00:02<00:14, 1.84it/s, TotalLoss=0.00471, PSNR=24.9]
Train epoch 7/10: 16%|█▌ | 5/32 [00:02<00:14, 1.84it/s, TotalLoss=0.00471, PSNR=24.9]
Train epoch 7/10: 16%|█▌ | 5/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00471, PSNR=25]
Train epoch 7/10: 19%|█▉ | 6/32 [00:03<00:14, 1.85it/s, TotalLoss=0.00471, PSNR=25]
Train epoch 7/10: 19%|█▉ | 6/32 [00:03<00:14, 1.85it/s, TotalLoss=0.00471, PSNR=25]
Train epoch 7/10: 19%|█▉ | 6/32 [00:03<00:14, 1.85it/s, TotalLoss=0.00472, PSNR=24.9]
Train epoch 7/10: 22%|██▏ | 7/32 [00:03<00:13, 1.85it/s, TotalLoss=0.00472, PSNR=24.9]
Train epoch 7/10: 22%|██▏ | 7/32 [00:03<00:13, 1.85it/s, TotalLoss=0.00472, PSNR=24.9]
Train epoch 7/10: 22%|██▏ | 7/32 [00:04<00:13, 1.85it/s, TotalLoss=0.00469, PSNR=24.9]
Train epoch 7/10: 25%|██▌ | 8/32 [00:04<00:12, 1.85it/s, TotalLoss=0.00469, PSNR=24.9]
Train epoch 7/10: 25%|██▌ | 8/32 [00:04<00:12, 1.85it/s, TotalLoss=0.00469, PSNR=24.9]
Train epoch 7/10: 25%|██▌ | 8/32 [00:04<00:12, 1.85it/s, TotalLoss=0.00472, PSNR=24.9]
Train epoch 7/10: 28%|██▊ | 9/32 [00:04<00:12, 1.85it/s, TotalLoss=0.00472, PSNR=24.9]
Train epoch 7/10: 28%|██▊ | 9/32 [00:04<00:12, 1.85it/s, TotalLoss=0.00472, PSNR=24.9]
Train epoch 7/10: 28%|██▊ | 9/32 [00:05<00:12, 1.85it/s, TotalLoss=0.00466, PSNR=25]
Train epoch 7/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00466, PSNR=25]
Train epoch 7/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00466, PSNR=25]
Train epoch 7/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00462, PSNR=25]
Train epoch 7/10: 34%|███▍ | 11/32 [00:05<00:11, 1.82it/s, TotalLoss=0.00462, PSNR=25]
Train epoch 7/10: 34%|███▍ | 11/32 [00:05<00:11, 1.82it/s, TotalLoss=0.00462, PSNR=25]
Train epoch 7/10: 34%|███▍ | 11/32 [00:06<00:11, 1.82it/s, TotalLoss=0.00465, PSNR=25]
Train epoch 7/10: 38%|███▊ | 12/32 [00:06<00:10, 1.83it/s, TotalLoss=0.00465, PSNR=25]
Train epoch 7/10: 38%|███▊ | 12/32 [00:06<00:10, 1.83it/s, TotalLoss=0.00465, PSNR=25]
Train epoch 7/10: 38%|███▊ | 12/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00464, PSNR=25]
Train epoch 7/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00464, PSNR=25]
Train epoch 7/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00464, PSNR=25]
Train epoch 7/10: 41%|████ | 13/32 [00:07<00:10, 1.83it/s, TotalLoss=0.00472, PSNR=24.9]
Train epoch 7/10: 44%|████▍ | 14/32 [00:07<00:09, 1.84it/s, TotalLoss=0.00472, PSNR=24.9]
Train epoch 7/10: 44%|████▍ | 14/32 [00:07<00:09, 1.84it/s, TotalLoss=0.00472, PSNR=24.9]
Train epoch 7/10: 44%|████▍ | 14/32 [00:08<00:09, 1.84it/s, TotalLoss=0.0047, PSNR=24.9]
Train epoch 7/10: 47%|████▋ | 15/32 [00:08<00:09, 1.83it/s, TotalLoss=0.0047, PSNR=24.9]
Train epoch 7/10: 47%|████▋ | 15/32 [00:08<00:09, 1.83it/s, TotalLoss=0.0047, PSNR=24.9]
Train epoch 7/10: 47%|████▋ | 15/32 [00:08<00:09, 1.83it/s, TotalLoss=0.00477, PSNR=24.9]
Train epoch 7/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00477, PSNR=24.9]
Train epoch 7/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00477, PSNR=24.9]
Train epoch 7/10: 50%|█████ | 16/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00473, PSNR=24.9]
Train epoch 7/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00473, PSNR=24.9]
Train epoch 7/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00473, PSNR=24.9]
Train epoch 7/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00476, PSNR=24.9]
Train epoch 7/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.00476, PSNR=24.9]
Train epoch 7/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.00476, PSNR=24.9]
Train epoch 7/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00487, PSNR=24.8]
Train epoch 7/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.85it/s, TotalLoss=0.00487, PSNR=24.8]
Train epoch 7/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.85it/s, TotalLoss=0.00487, PSNR=24.8]
Train epoch 7/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.85it/s, TotalLoss=0.00479, PSNR=24.9]
Train epoch 7/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.85it/s, TotalLoss=0.00479, PSNR=24.9]
Train epoch 7/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.85it/s, TotalLoss=0.00479, PSNR=24.9]
Train epoch 7/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.85it/s, TotalLoss=0.00482, PSNR=24.9]
Train epoch 7/10: 66%|██████▌ | 21/32 [00:11<00:06, 1.81it/s, TotalLoss=0.00482, PSNR=24.9]
Train epoch 7/10: 66%|██████▌ | 21/32 [00:11<00:06, 1.81it/s, TotalLoss=0.00482, PSNR=24.9]
Train epoch 7/10: 66%|██████▌ | 21/32 [00:11<00:06, 1.81it/s, TotalLoss=0.00481, PSNR=24.9]
Train epoch 7/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.82it/s, TotalLoss=0.00481, PSNR=24.9]
Train epoch 7/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.82it/s, TotalLoss=0.00481, PSNR=24.9]
Train epoch 7/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.82it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.83it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.83it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 72%|███████▏ | 23/32 [00:13<00:04, 1.83it/s, TotalLoss=0.00482, PSNR=24.8]
Train epoch 7/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00482, PSNR=24.8]
Train epoch 7/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00482, PSNR=24.8]
Train epoch 7/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.84it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.84it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 78%|███████▊ | 25/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00479, PSNR=24.9]
Train epoch 7/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00479, PSNR=24.9]
Train epoch 7/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00479, PSNR=24.9]
Train epoch 7/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00478, PSNR=24.9]
Train epoch 7/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.85it/s, TotalLoss=0.00478, PSNR=24.9]
Train epoch 7/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.85it/s, TotalLoss=0.00478, PSNR=24.9]
Train epoch 7/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.85it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.85it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.85it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.85it/s, TotalLoss=0.00483, PSNR=24.9]
Train epoch 7/10: 91%|█████████ | 29/32 [00:15<00:01, 1.85it/s, TotalLoss=0.00483, PSNR=24.9]
Train epoch 7/10: 91%|█████████ | 29/32 [00:15<00:01, 1.85it/s, TotalLoss=0.00483, PSNR=24.9]
Train epoch 7/10: 91%|█████████ | 29/32 [00:16<00:01, 1.85it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.85it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.85it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 7/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.85it/s, TotalLoss=0.00478, PSNR=24.9]
Train epoch 7/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.84it/s, TotalLoss=0.00478, PSNR=24.9]
Train epoch 7/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.84it/s, TotalLoss=0.00478, PSNR=24.9]
Train epoch 7/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.84it/s, TotalLoss=0.00478, PSNR=24.9]
Train epoch 7/10: 100%|██████████| 32/32 [00:18<00:00, 1.39it/s, TotalLoss=0.00478, PSNR=24.9]
Train epoch 7/10: 100%|██████████| 32/32 [00:18<00:00, 1.78it/s, TotalLoss=0.00478, PSNR=24.9]
0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 7/10: 0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 7/10: 0%| | 0/1 [00:00<?, ?it/s, PSNR=20.1]
Eval epoch 7/10: 100%|██████████| 1/1 [00:00<00:00, 6.37it/s, PSNR=20.1]
Eval epoch 7/10: 100%|██████████| 1/1 [00:00<00:00, 6.35it/s, PSNR=20.1]
0%| | 0/32 [00:00<?, ?it/s]
Train epoch 8/10: 0%| | 0/32 [00:00<?, ?it/s]
Train epoch 8/10: 0%| | 0/32 [00:00<?, ?it/s, TotalLoss=0.00524, PSNR=24.9]
Train epoch 8/10: 3%|▎ | 1/32 [00:00<00:17, 1.78it/s, TotalLoss=0.00524, PSNR=24.9]
Train epoch 8/10: 3%|▎ | 1/32 [00:00<00:17, 1.78it/s, TotalLoss=0.00524, PSNR=24.9]
Train epoch 8/10: 3%|▎ | 1/32 [00:01<00:17, 1.78it/s, TotalLoss=0.00422, PSNR=25.5]
Train epoch 8/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.00422, PSNR=25.5]
Train epoch 8/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.00422, PSNR=25.5]
Train epoch 8/10: 6%|▋ | 2/32 [00:01<00:16, 1.81it/s, TotalLoss=0.0042, PSNR=25.5]
Train epoch 8/10: 9%|▉ | 3/32 [00:01<00:15, 1.83it/s, TotalLoss=0.0042, PSNR=25.5]
Train epoch 8/10: 9%|▉ | 3/32 [00:01<00:15, 1.83it/s, TotalLoss=0.0042, PSNR=25.5]
Train epoch 8/10: 9%|▉ | 3/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00422, PSNR=25.4]
Train epoch 8/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00422, PSNR=25.4]
Train epoch 8/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00422, PSNR=25.4]
Train epoch 8/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00444, PSNR=25.2]
Train epoch 8/10: 16%|█▌ | 5/32 [00:02<00:14, 1.82it/s, TotalLoss=0.00444, PSNR=25.2]
Train epoch 8/10: 16%|█▌ | 5/32 [00:02<00:14, 1.82it/s, TotalLoss=0.00444, PSNR=25.2]
Train epoch 8/10: 16%|█▌ | 5/32 [00:03<00:14, 1.82it/s, TotalLoss=0.00452, PSNR=25.1]
Train epoch 8/10: 19%|█▉ | 6/32 [00:03<00:14, 1.83it/s, TotalLoss=0.00452, PSNR=25.1]
Train epoch 8/10: 19%|█▉ | 6/32 [00:03<00:14, 1.83it/s, TotalLoss=0.00452, PSNR=25.1]
Train epoch 8/10: 19%|█▉ | 6/32 [00:03<00:14, 1.83it/s, TotalLoss=0.0045, PSNR=25.2]
Train epoch 8/10: 22%|██▏ | 7/32 [00:03<00:13, 1.84it/s, TotalLoss=0.0045, PSNR=25.2]
Train epoch 8/10: 22%|██▏ | 7/32 [00:03<00:13, 1.84it/s, TotalLoss=0.0045, PSNR=25.2]
Train epoch 8/10: 22%|██▏ | 7/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00447, PSNR=25.3]
Train epoch 8/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00447, PSNR=25.3]
Train epoch 8/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00447, PSNR=25.3]
Train epoch 8/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00454, PSNR=25.2]
Train epoch 8/10: 28%|██▊ | 9/32 [00:04<00:12, 1.84it/s, TotalLoss=0.00454, PSNR=25.2]
Train epoch 8/10: 28%|██▊ | 9/32 [00:04<00:12, 1.84it/s, TotalLoss=0.00454, PSNR=25.2]
Train epoch 8/10: 28%|██▊ | 9/32 [00:05<00:12, 1.84it/s, TotalLoss=0.00456, PSNR=25.1]
Train epoch 8/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00456, PSNR=25.1]
Train epoch 8/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00456, PSNR=25.1]
Train epoch 8/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00452, PSNR=25.2]
Train epoch 8/10: 34%|███▍ | 11/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00452, PSNR=25.2]
Train epoch 8/10: 34%|███▍ | 11/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00452, PSNR=25.2]
Train epoch 8/10: 34%|███▍ | 11/32 [00:06<00:11, 1.85it/s, TotalLoss=0.00451, PSNR=25.2]
Train epoch 8/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00451, PSNR=25.2]
Train epoch 8/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00451, PSNR=25.2]
Train epoch 8/10: 38%|███▊ | 12/32 [00:07<00:10, 1.84it/s, TotalLoss=0.0045, PSNR=25.2]
Train epoch 8/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.0045, PSNR=25.2]
Train epoch 8/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.0045, PSNR=25.2]
Train epoch 8/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00449, PSNR=25.2]
Train epoch 8/10: 44%|████▍ | 14/32 [00:07<00:09, 1.84it/s, TotalLoss=0.00449, PSNR=25.2]
Train epoch 8/10: 44%|████▍ | 14/32 [00:07<00:09, 1.84it/s, TotalLoss=0.00449, PSNR=25.2]
Train epoch 8/10: 44%|████▍ | 14/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00448, PSNR=25.2]
Train epoch 8/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00448, PSNR=25.2]
Train epoch 8/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00448, PSNR=25.2]
Train epoch 8/10: 47%|████▋ | 15/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00448, PSNR=25.2]
Train epoch 8/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00448, PSNR=25.2]
Train epoch 8/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00448, PSNR=25.2]
Train epoch 8/10: 50%|█████ | 16/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00441, PSNR=25.4]
Train epoch 8/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00441, PSNR=25.4]
Train epoch 8/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00441, PSNR=25.4]
Train epoch 8/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00443, PSNR=25.3]
Train epoch 8/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.00443, PSNR=25.3]
Train epoch 8/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.00443, PSNR=25.3]
Train epoch 8/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00443, PSNR=25.3]
Train epoch 8/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.85it/s, TotalLoss=0.00443, PSNR=25.3]
Train epoch 8/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.85it/s, TotalLoss=0.00443, PSNR=25.3]
Train epoch 8/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.85it/s, TotalLoss=0.00447, PSNR=25.3]
Train epoch 8/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.85it/s, TotalLoss=0.00447, PSNR=25.3]
Train epoch 8/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.85it/s, TotalLoss=0.00447, PSNR=25.3]
Train epoch 8/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.85it/s, TotalLoss=0.00445, PSNR=25.3]
Train epoch 8/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.85it/s, TotalLoss=0.00445, PSNR=25.3]
Train epoch 8/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.85it/s, TotalLoss=0.00445, PSNR=25.3]
Train epoch 8/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.85it/s, TotalLoss=0.00446, PSNR=25.3]
Train epoch 8/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.85it/s, TotalLoss=0.00446, PSNR=25.3]
Train epoch 8/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.85it/s, TotalLoss=0.00446, PSNR=25.3]
Train epoch 8/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.85it/s, TotalLoss=0.00451, PSNR=25.2]
Train epoch 8/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.85it/s, TotalLoss=0.00451, PSNR=25.2]
Train epoch 8/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.85it/s, TotalLoss=0.00451, PSNR=25.2]
Train epoch 8/10: 72%|███████▏ | 23/32 [00:13<00:04, 1.85it/s, TotalLoss=0.00446, PSNR=25.3]
Train epoch 8/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.79it/s, TotalLoss=0.00446, PSNR=25.3]
Train epoch 8/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.79it/s, TotalLoss=0.00446, PSNR=25.3]
Train epoch 8/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.79it/s, TotalLoss=0.00447, PSNR=25.2]
Train epoch 8/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.81it/s, TotalLoss=0.00447, PSNR=25.2]
Train epoch 8/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.81it/s, TotalLoss=0.00447, PSNR=25.2]
Train epoch 8/10: 78%|███████▊ | 25/32 [00:14<00:03, 1.81it/s, TotalLoss=0.00448, PSNR=25.2]
Train epoch 8/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.82it/s, TotalLoss=0.00448, PSNR=25.2]
Train epoch 8/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.82it/s, TotalLoss=0.00448, PSNR=25.2]
Train epoch 8/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.82it/s, TotalLoss=0.00452, PSNR=25.2]
Train epoch 8/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.83it/s, TotalLoss=0.00452, PSNR=25.2]
Train epoch 8/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.83it/s, TotalLoss=0.00452, PSNR=25.2]
Train epoch 8/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.83it/s, TotalLoss=0.00458, PSNR=25.2]
Train epoch 8/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.84it/s, TotalLoss=0.00458, PSNR=25.2]
Train epoch 8/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.84it/s, TotalLoss=0.00458, PSNR=25.2]
Train epoch 8/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.84it/s, TotalLoss=0.0046, PSNR=25.1]
Train epoch 8/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.0046, PSNR=25.1]
Train epoch 8/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.0046, PSNR=25.1]
Train epoch 8/10: 91%|█████████ | 29/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00464, PSNR=25.1]
Train epoch 8/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00464, PSNR=25.1]
Train epoch 8/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00464, PSNR=25.1]
Train epoch 8/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00476, PSNR=25]
Train epoch 8/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.85it/s, TotalLoss=0.00476, PSNR=25]
Train epoch 8/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.85it/s, TotalLoss=0.00476, PSNR=25]
Train epoch 8/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.85it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 8/10: 100%|██████████| 32/32 [00:18<00:00, 1.38it/s, TotalLoss=0.0048, PSNR=24.9]
Train epoch 8/10: 100%|██████████| 32/32 [00:18<00:00, 1.78it/s, TotalLoss=0.0048, PSNR=24.9]
0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 8/10: 0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 8/10: 0%| | 0/1 [00:00<?, ?it/s, PSNR=18.3]
Eval epoch 8/10: 100%|██████████| 1/1 [00:00<00:00, 6.17it/s, PSNR=18.3]
Eval epoch 8/10: 100%|██████████| 1/1 [00:00<00:00, 6.15it/s, PSNR=18.3]
0%| | 0/32 [00:00<?, ?it/s]
Train epoch 9/10: 0%| | 0/32 [00:00<?, ?it/s]
Train epoch 9/10: 0%| | 0/32 [00:00<?, ?it/s, TotalLoss=0.00914, PSNR=20.9]
Train epoch 9/10: 3%|▎ | 1/32 [00:00<00:17, 1.78it/s, TotalLoss=0.00914, PSNR=20.9]
Train epoch 9/10: 3%|▎ | 1/32 [00:00<00:17, 1.78it/s, TotalLoss=0.00914, PSNR=20.9]
Train epoch 9/10: 3%|▎ | 1/32 [00:01<00:17, 1.78it/s, TotalLoss=0.00973, PSNR=20.7]
Train epoch 9/10: 6%|▋ | 2/32 [00:01<00:16, 1.82it/s, TotalLoss=0.00973, PSNR=20.7]
Train epoch 9/10: 6%|▋ | 2/32 [00:01<00:16, 1.82it/s, TotalLoss=0.00973, PSNR=20.7]
Train epoch 9/10: 6%|▋ | 2/32 [00:01<00:16, 1.82it/s, TotalLoss=0.00977, PSNR=20.7]
Train epoch 9/10: 9%|▉ | 3/32 [00:01<00:15, 1.82it/s, TotalLoss=0.00977, PSNR=20.7]
Train epoch 9/10: 9%|▉ | 3/32 [00:01<00:15, 1.82it/s, TotalLoss=0.00977, PSNR=20.7]
Train epoch 9/10: 9%|▉ | 3/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00971, PSNR=20.7]
Train epoch 9/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00971, PSNR=20.7]
Train epoch 9/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.00971, PSNR=20.7]
Train epoch 9/10: 12%|█▎ | 4/32 [00:02<00:15, 1.83it/s, TotalLoss=0.0097, PSNR=20.7]
Train epoch 9/10: 16%|█▌ | 5/32 [00:02<00:14, 1.84it/s, TotalLoss=0.0097, PSNR=20.7]
Train epoch 9/10: 16%|█▌ | 5/32 [00:02<00:14, 1.84it/s, TotalLoss=0.0097, PSNR=20.7]
Train epoch 9/10: 16%|█▌ | 5/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00957, PSNR=20.7]
Train epoch 9/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00957, PSNR=20.7]
Train epoch 9/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00957, PSNR=20.7]
Train epoch 9/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00948, PSNR=20.8]
Train epoch 9/10: 22%|██▏ | 7/32 [00:03<00:13, 1.85it/s, TotalLoss=0.00948, PSNR=20.8]
Train epoch 9/10: 22%|██▏ | 7/32 [00:03<00:13, 1.85it/s, TotalLoss=0.00948, PSNR=20.8]
Train epoch 9/10: 22%|██▏ | 7/32 [00:04<00:13, 1.85it/s, TotalLoss=0.00943, PSNR=20.8]
Train epoch 9/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00943, PSNR=20.8]
Train epoch 9/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00943, PSNR=20.8]
Train epoch 9/10: 25%|██▌ | 8/32 [00:04<00:13, 1.84it/s, TotalLoss=0.00949, PSNR=20.7]
Train epoch 9/10: 28%|██▊ | 9/32 [00:04<00:12, 1.84it/s, TotalLoss=0.00949, PSNR=20.7]
Train epoch 9/10: 28%|██▊ | 9/32 [00:04<00:12, 1.84it/s, TotalLoss=0.00949, PSNR=20.7]
Train epoch 9/10: 28%|██▊ | 9/32 [00:05<00:12, 1.84it/s, TotalLoss=0.00939, PSNR=20.8]
Train epoch 9/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00939, PSNR=20.8]
Train epoch 9/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00939, PSNR=20.8]
Train epoch 9/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00936, PSNR=20.8]
Train epoch 9/10: 34%|███▍ | 11/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00936, PSNR=20.8]
Train epoch 9/10: 34%|███▍ | 11/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00936, PSNR=20.8]
Train epoch 9/10: 34%|███▍ | 11/32 [00:06<00:11, 1.85it/s, TotalLoss=0.00942, PSNR=20.8]
Train epoch 9/10: 38%|███▊ | 12/32 [00:06<00:10, 1.85it/s, TotalLoss=0.00942, PSNR=20.8]
Train epoch 9/10: 38%|███▊ | 12/32 [00:06<00:10, 1.85it/s, TotalLoss=0.00942, PSNR=20.8]
Train epoch 9/10: 38%|███▊ | 12/32 [00:07<00:10, 1.85it/s, TotalLoss=0.00935, PSNR=20.8]
Train epoch 9/10: 41%|████ | 13/32 [00:07<00:10, 1.85it/s, TotalLoss=0.00935, PSNR=20.8]
Train epoch 9/10: 41%|████ | 13/32 [00:07<00:10, 1.85it/s, TotalLoss=0.00935, PSNR=20.8]
Train epoch 9/10: 41%|████ | 13/32 [00:07<00:10, 1.85it/s, TotalLoss=0.00928, PSNR=20.8]
Train epoch 9/10: 44%|████▍ | 14/32 [00:07<00:09, 1.84it/s, TotalLoss=0.00928, PSNR=20.8]
Train epoch 9/10: 44%|████▍ | 14/32 [00:07<00:09, 1.84it/s, TotalLoss=0.00928, PSNR=20.8]
Train epoch 9/10: 44%|████▍ | 14/32 [00:08<00:09, 1.84it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 9/10: 47%|████▋ | 15/32 [00:08<00:09, 1.85it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 9/10: 47%|████▋ | 15/32 [00:08<00:09, 1.85it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 9/10: 47%|████▋ | 15/32 [00:08<00:09, 1.85it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 9/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 9/10: 50%|█████ | 16/32 [00:08<00:08, 1.84it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 9/10: 50%|█████ | 16/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 9/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 9/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 9/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.84it/s, TotalLoss=0.00927, PSNR=20.8]
Train epoch 9/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.00927, PSNR=20.8]
Train epoch 9/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.00927, PSNR=20.8]
Train epoch 9/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00924, PSNR=20.8]
Train epoch 9/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00924, PSNR=20.8]
Train epoch 9/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00924, PSNR=20.8]
Train epoch 9/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00917, PSNR=20.8]
Train epoch 9/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.84it/s, TotalLoss=0.00917, PSNR=20.8]
Train epoch 9/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.84it/s, TotalLoss=0.00917, PSNR=20.8]
Train epoch 9/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.84it/s, TotalLoss=0.00933, PSNR=20.8]
Train epoch 9/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00933, PSNR=20.8]
Train epoch 9/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00933, PSNR=20.8]
Train epoch 9/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00935, PSNR=20.8]
Train epoch 9/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.83it/s, TotalLoss=0.00935, PSNR=20.8]
Train epoch 9/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.83it/s, TotalLoss=0.00935, PSNR=20.8]
Train epoch 9/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.83it/s, TotalLoss=0.00929, PSNR=20.8]
Train epoch 9/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.83it/s, TotalLoss=0.00929, PSNR=20.8]
Train epoch 9/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.83it/s, TotalLoss=0.00929, PSNR=20.8]
Train epoch 9/10: 72%|███████▏ | 23/32 [00:13<00:04, 1.83it/s, TotalLoss=0.00933, PSNR=20.8]
Train epoch 9/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00933, PSNR=20.8]
Train epoch 9/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00933, PSNR=20.8]
Train epoch 9/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00931, PSNR=20.8]
Train epoch 9/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.84it/s, TotalLoss=0.00931, PSNR=20.8]
Train epoch 9/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.84it/s, TotalLoss=0.00931, PSNR=20.8]
Train epoch 9/10: 78%|███████▊ | 25/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00927, PSNR=20.8]
Train epoch 9/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00927, PSNR=20.8]
Train epoch 9/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00927, PSNR=20.8]
Train epoch 9/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.84it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 9/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.84it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 9/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.84it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 9/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.84it/s, TotalLoss=0.00927, PSNR=20.8]
Train epoch 9/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.85it/s, TotalLoss=0.00927, PSNR=20.8]
Train epoch 9/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.85it/s, TotalLoss=0.00927, PSNR=20.8]
Train epoch 9/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.85it/s, TotalLoss=0.0093, PSNR=20.8]
Train epoch 9/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.0093, PSNR=20.8]
Train epoch 9/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.0093, PSNR=20.8]
Train epoch 9/10: 91%|█████████ | 29/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00928, PSNR=20.8]
Train epoch 9/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00928, PSNR=20.8]
Train epoch 9/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00928, PSNR=20.8]
Train epoch 9/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 9/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.84it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 9/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.84it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 9/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.84it/s, TotalLoss=0.00931, PSNR=20.8]
Train epoch 9/10: 100%|██████████| 32/32 [00:17<00:00, 1.39it/s, TotalLoss=0.00931, PSNR=20.8]
Train epoch 9/10: 100%|██████████| 32/32 [00:17<00:00, 1.78it/s, TotalLoss=0.00931, PSNR=20.8]
0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 9/10: 0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 9/10: 0%| | 0/1 [00:00<?, ?it/s, PSNR=18.2]
Eval epoch 9/10: 100%|██████████| 1/1 [00:00<00:00, 6.35it/s, PSNR=18.2]
Eval epoch 9/10: 100%|██████████| 1/1 [00:00<00:00, 6.34it/s, PSNR=18.2]
0%| | 0/32 [00:00<?, ?it/s]
Train epoch 10/10: 0%| | 0/32 [00:00<?, ?it/s]
Train epoch 10/10: 0%| | 0/32 [00:00<?, ?it/s, TotalLoss=0.00907, PSNR=20.8]
Train epoch 10/10: 3%|▎ | 1/32 [00:00<00:17, 1.78it/s, TotalLoss=0.00907, PSNR=20.8]
Train epoch 10/10: 3%|▎ | 1/32 [00:00<00:17, 1.78it/s, TotalLoss=0.00907, PSNR=20.8]
Train epoch 10/10: 3%|▎ | 1/32 [00:01<00:17, 1.78it/s, TotalLoss=0.00947, PSNR=20.6]
Train epoch 10/10: 6%|▋ | 2/32 [00:01<00:16, 1.80it/s, TotalLoss=0.00947, PSNR=20.6]
Train epoch 10/10: 6%|▋ | 2/32 [00:01<00:16, 1.80it/s, TotalLoss=0.00947, PSNR=20.6]
Train epoch 10/10: 6%|▋ | 2/32 [00:01<00:16, 1.80it/s, TotalLoss=0.00917, PSNR=20.8]
Train epoch 10/10: 9%|▉ | 3/32 [00:01<00:15, 1.82it/s, TotalLoss=0.00917, PSNR=20.8]
Train epoch 10/10: 9%|▉ | 3/32 [00:01<00:15, 1.82it/s, TotalLoss=0.00917, PSNR=20.8]
Train epoch 10/10: 9%|▉ | 3/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00921, PSNR=20.8]
Train epoch 10/10: 12%|█▎ | 4/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00921, PSNR=20.8]
Train epoch 10/10: 12%|█▎ | 4/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00921, PSNR=20.8]
Train epoch 10/10: 12%|█▎ | 4/32 [00:02<00:15, 1.82it/s, TotalLoss=0.00932, PSNR=20.7]
Train epoch 10/10: 16%|█▌ | 5/32 [00:02<00:14, 1.84it/s, TotalLoss=0.00932, PSNR=20.7]
Train epoch 10/10: 16%|█▌ | 5/32 [00:02<00:14, 1.84it/s, TotalLoss=0.00932, PSNR=20.7]
Train epoch 10/10: 16%|█▌ | 5/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00922, PSNR=20.8]
Train epoch 10/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00922, PSNR=20.8]
Train epoch 10/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00922, PSNR=20.8]
Train epoch 10/10: 19%|█▉ | 6/32 [00:03<00:14, 1.84it/s, TotalLoss=0.00918, PSNR=20.8]
Train epoch 10/10: 22%|██▏ | 7/32 [00:03<00:13, 1.85it/s, TotalLoss=0.00918, PSNR=20.8]
Train epoch 10/10: 22%|██▏ | 7/32 [00:03<00:13, 1.85it/s, TotalLoss=0.00918, PSNR=20.8]
Train epoch 10/10: 22%|██▏ | 7/32 [00:04<00:13, 1.85it/s, TotalLoss=0.00909, PSNR=20.9]
Train epoch 10/10: 25%|██▌ | 8/32 [00:04<00:13, 1.85it/s, TotalLoss=0.00909, PSNR=20.9]
Train epoch 10/10: 25%|██▌ | 8/32 [00:04<00:13, 1.85it/s, TotalLoss=0.00909, PSNR=20.9]
Train epoch 10/10: 25%|██▌ | 8/32 [00:04<00:13, 1.85it/s, TotalLoss=0.00896, PSNR=20.9]
Train epoch 10/10: 28%|██▊ | 9/32 [00:04<00:12, 1.85it/s, TotalLoss=0.00896, PSNR=20.9]
Train epoch 10/10: 28%|██▊ | 9/32 [00:04<00:12, 1.85it/s, TotalLoss=0.00896, PSNR=20.9]
Train epoch 10/10: 28%|██▊ | 9/32 [00:05<00:12, 1.85it/s, TotalLoss=0.00898, PSNR=20.9]
Train epoch 10/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00898, PSNR=20.9]
Train epoch 10/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00898, PSNR=20.9]
Train epoch 10/10: 31%|███▏ | 10/32 [00:05<00:11, 1.85it/s, TotalLoss=0.00901, PSNR=20.9]
Train epoch 10/10: 34%|███▍ | 11/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00901, PSNR=20.9]
Train epoch 10/10: 34%|███▍ | 11/32 [00:05<00:11, 1.84it/s, TotalLoss=0.00901, PSNR=20.9]
Train epoch 10/10: 34%|███▍ | 11/32 [00:06<00:11, 1.84it/s, TotalLoss=0.00909, PSNR=20.9]
Train epoch 10/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00909, PSNR=20.9]
Train epoch 10/10: 38%|███▊ | 12/32 [00:06<00:10, 1.84it/s, TotalLoss=0.00909, PSNR=20.9]
Train epoch 10/10: 38%|███▊ | 12/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00912, PSNR=20.9]
Train epoch 10/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00912, PSNR=20.9]
Train epoch 10/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.00912, PSNR=20.9]
Train epoch 10/10: 41%|████ | 13/32 [00:07<00:10, 1.84it/s, TotalLoss=0.0091, PSNR=20.9]
Train epoch 10/10: 44%|████▍ | 14/32 [00:07<00:09, 1.85it/s, TotalLoss=0.0091, PSNR=20.9]
Train epoch 10/10: 44%|████▍ | 14/32 [00:07<00:09, 1.85it/s, TotalLoss=0.0091, PSNR=20.9]
Train epoch 10/10: 44%|████▍ | 14/32 [00:08<00:09, 1.85it/s, TotalLoss=0.00904, PSNR=20.9]
Train epoch 10/10: 47%|████▋ | 15/32 [00:08<00:09, 1.82it/s, TotalLoss=0.00904, PSNR=20.9]
Train epoch 10/10: 47%|████▋ | 15/32 [00:08<00:09, 1.82it/s, TotalLoss=0.00904, PSNR=20.9]
Train epoch 10/10: 47%|████▋ | 15/32 [00:08<00:09, 1.82it/s, TotalLoss=0.0091, PSNR=20.9]
Train epoch 10/10: 50%|█████ | 16/32 [00:08<00:08, 1.83it/s, TotalLoss=0.0091, PSNR=20.9]
Train epoch 10/10: 50%|█████ | 16/32 [00:08<00:08, 1.83it/s, TotalLoss=0.0091, PSNR=20.9]
Train epoch 10/10: 50%|█████ | 16/32 [00:09<00:08, 1.83it/s, TotalLoss=0.0092, PSNR=20.8]
Train epoch 10/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.83it/s, TotalLoss=0.0092, PSNR=20.8]
Train epoch 10/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.83it/s, TotalLoss=0.0092, PSNR=20.8]
Train epoch 10/10: 53%|█████▎ | 17/32 [00:09<00:08, 1.83it/s, TotalLoss=0.0092, PSNR=20.8]
Train epoch 10/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.0092, PSNR=20.8]
Train epoch 10/10: 56%|█████▋ | 18/32 [00:09<00:07, 1.84it/s, TotalLoss=0.0092, PSNR=20.8]
Train epoch 10/10: 56%|█████▋ | 18/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00922, PSNR=20.8]
Train epoch 10/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00922, PSNR=20.8]
Train epoch 10/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00922, PSNR=20.8]
Train epoch 10/10: 59%|█████▉ | 19/32 [00:10<00:07, 1.84it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 10/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.83it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 10/10: 62%|██████▎ | 20/32 [00:10<00:06, 1.83it/s, TotalLoss=0.00925, PSNR=20.8]
Train epoch 10/10: 62%|██████▎ | 20/32 [00:11<00:06, 1.83it/s, TotalLoss=0.00923, PSNR=20.8]
Train epoch 10/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.83it/s, TotalLoss=0.00923, PSNR=20.8]
Train epoch 10/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.83it/s, TotalLoss=0.00923, PSNR=20.8]
Train epoch 10/10: 66%|██████▌ | 21/32 [00:11<00:05, 1.83it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 10/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 10/10: 69%|██████▉ | 22/32 [00:11<00:05, 1.84it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 10/10: 69%|██████▉ | 22/32 [00:12<00:05, 1.84it/s, TotalLoss=0.00924, PSNR=20.8]
Train epoch 10/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.84it/s, TotalLoss=0.00924, PSNR=20.8]
Train epoch 10/10: 72%|███████▏ | 23/32 [00:12<00:04, 1.84it/s, TotalLoss=0.00924, PSNR=20.8]
Train epoch 10/10: 72%|███████▏ | 23/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00923, PSNR=20.8]
Train epoch 10/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00923, PSNR=20.8]
Train epoch 10/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00923, PSNR=20.8]
Train epoch 10/10: 75%|███████▌ | 24/32 [00:13<00:04, 1.84it/s, TotalLoss=0.00923, PSNR=20.8]
Train epoch 10/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.82it/s, TotalLoss=0.00923, PSNR=20.8]
Train epoch 10/10: 78%|███████▊ | 25/32 [00:13<00:03, 1.82it/s, TotalLoss=0.00923, PSNR=20.8]
Train epoch 10/10: 78%|███████▊ | 25/32 [00:14<00:03, 1.82it/s, TotalLoss=0.00931, PSNR=20.8]
Train epoch 10/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.83it/s, TotalLoss=0.00931, PSNR=20.8]
Train epoch 10/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.83it/s, TotalLoss=0.00931, PSNR=20.8]
Train epoch 10/10: 81%|████████▏ | 26/32 [00:14<00:03, 1.83it/s, TotalLoss=0.00931, PSNR=20.8]
Train epoch 10/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.83it/s, TotalLoss=0.00931, PSNR=20.8]
Train epoch 10/10: 84%|████████▍ | 27/32 [00:14<00:02, 1.83it/s, TotalLoss=0.00931, PSNR=20.8]
Train epoch 10/10: 84%|████████▍ | 27/32 [00:15<00:02, 1.83it/s, TotalLoss=0.00932, PSNR=20.8]
Train epoch 10/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.83it/s, TotalLoss=0.00932, PSNR=20.8]
Train epoch 10/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.83it/s, TotalLoss=0.00932, PSNR=20.8]
Train epoch 10/10: 88%|████████▊ | 28/32 [00:15<00:02, 1.83it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 10/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 10/10: 91%|█████████ | 29/32 [00:15<00:01, 1.84it/s, TotalLoss=0.00926, PSNR=20.8]
Train epoch 10/10: 91%|█████████ | 29/32 [00:16<00:01, 1.84it/s, TotalLoss=0.00921, PSNR=20.8]
Train epoch 10/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.83it/s, TotalLoss=0.00921, PSNR=20.8]
Train epoch 10/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.83it/s, TotalLoss=0.00921, PSNR=20.8]
Train epoch 10/10: 94%|█████████▍| 30/32 [00:16<00:01, 1.83it/s, TotalLoss=0.00922, PSNR=20.8]
Train epoch 10/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.83it/s, TotalLoss=0.00922, PSNR=20.8]
Train epoch 10/10: 97%|█████████▋| 31/32 [00:16<00:00, 1.83it/s, TotalLoss=0.00922, PSNR=20.8]
Train epoch 10/10: 97%|█████████▋| 31/32 [00:17<00:00, 1.83it/s, TotalLoss=0.00917, PSNR=20.8]
Train epoch 10/10: 100%|██████████| 32/32 [00:18<00:00, 1.38it/s, TotalLoss=0.00917, PSNR=20.8]
Train epoch 10/10: 100%|██████████| 32/32 [00:18<00:00, 1.77it/s, TotalLoss=0.00917, PSNR=20.8]
0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 10/10: 0%| | 0/1 [00:00<?, ?it/s]
Eval epoch 10/10: 0%| | 0/1 [00:00<?, ?it/s, PSNR=18.3]
Eval epoch 10/10: 100%|██████████| 1/1 [00:00<00:00, 6.19it/s, PSNR=18.3]
Eval epoch 10/10: 100%|██████████| 1/1 [00:00<00:00, 6.17it/s, PSNR=18.3]
Model, optimizer, scheduler, epoch_start successfully loaded from checkpoint: ckpts/deblurring/26-05-31-16:36:36/ckp_best.pth.tar
Test the network#
trainer.test(test_dataloader)
test_sample, _ = next(iter(test_dataloader))
model.eval()
test_sample = test_sample.to(device)
# Get the measurements and the ground truth
y = physics(test_sample)
with torch.no_grad():
rec = model(y, physics=physics)
backprojected = physics.A_adjoint(y)
dinv.utils.plot(
[backprojected, rec, test_sample],
titles=["Linear", "Reconstruction", "Ground truth"],
suptitle="Reconstruction results",
)
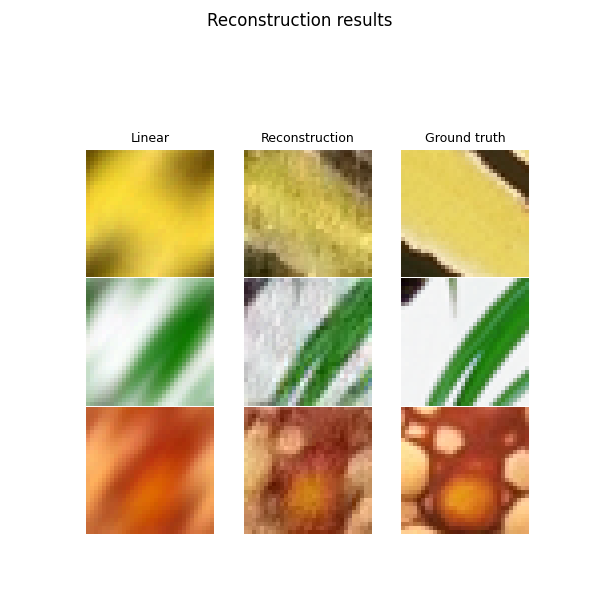
/local/jtachell/deepinv/deepinv/deepinv/training/trainer.py:1548: UserWarning: non_blocking_transfers=True but DataLoader.pin_memory=False; set pin_memory=True to overlap host-device copies with compute.
self.setup_train(train=False)
0%| | 0/1 [00:00<?, ?it/s]
Test: 0%| | 0/1 [00:00<?, ?it/s]
Test: 0%| | 0/1 [00:00<?, ?it/s, PSNR=20.4, PSNR no learning=17]
Test: 100%|██████████| 1/1 [00:00<00:00, 6.22it/s, PSNR=20.4, PSNR no learning=17]
Test: 100%|██████████| 1/1 [00:00<00:00, 6.20it/s, PSNR=20.4, PSNR no learning=17]
Test results:
PSNR no learning: 16.962 +- 0.648
PSNR: 20.362 +- 1.559
/local/jtachell/deepinv/deepinv/deepinv/utils/plotting.py:408: UserWarning: This figure was using a layout engine that is incompatible with subplots_adjust and/or tight_layout; not calling subplots_adjust.
fig.subplots_adjust(top=0.75)
Total running time of the script: (3 minutes 18.045 seconds)