
Note
New to DeepInverse? Get started with the basics with the 5 minute quickstart tutorial..
Vanilla PnP for computed tomography (CT).#
This example shows how to use a standard PnP algorithm with DnCNN denoiser for computed tomography.
import deepinv as dinv
from pathlib import Path
import torch
from deepinv.models import DnCNN
from deepinv.optim.data_fidelity import L2
from deepinv.optim.prior import PnP
from deepinv.optim.optimizers import PGD
from deepinv.utils import load_example
from deepinv.utils.plotting import plot, plot_curves
Setup paths for data loading and results.#
BASE_DIR = Path(".")
RESULTS_DIR = BASE_DIR / "results"
Load image and parameters#
# Set the global random seed from pytorch to ensure reproducibility of the example.
torch.manual_seed(0)
device = dinv.utils.get_device()
# Set up the variable to fetch dataset and operators.
method = "PnP"
img_size = 32
x = load_example(
"SheppLogan.png",
img_size=img_size,
grayscale=True,
resize_mode="resize",
device=device,
)
operation = "tomography"
Selected GPU 0 with 4861.25 MiB free memory
Set the forward operator#
We use the deepinv.physics.Tomography
class from the physics module to generate a CT measurements.
noise_level_img = 0.03 # Gaussian Noise standard deviation for the degradation
angles = 50
n_channels = 1 # 3 for color images, 1 for gray-scale images
physics = dinv.physics.Tomography(
img_width=img_size,
angles=angles,
normalize=True,
device=device,
noise_model=dinv.physics.GaussianNoise(sigma=noise_level_img),
)
scaling = torch.pi / (2 * angles) # approximate operator norm of A^T A
# Use parallel dataloader if using a GPU to speed up training,
# otherwise, as all computes are on CPU, use synchronous data loading.
num_workers = 4 if torch.cuda.is_available() else 0
/local/jtachell/deepinv/deepinv/deepinv/physics/forward.py:487: UserWarning: Following torch.nn.Module's design, the 'device' attribute is deprecated and will be removed in a future version. To move the module's buffers/parameters to a different device, use the `to()` method.
warnings.warn(
Set up the PnP algorithm to solve the inverse problem.#
We use the Proximal Gradient Descent optimization algorithm.
The algorithm alternates between a denoising step and a gradient descent step.
The denoising step is performed by a DNCNN pretrained denoiser deepinv.models.DnCNN.
Set up the PnP algorithm parameters : the stepsize, sigma_denoiser the noise level of the denoiser.
Attention: The choice of the stepsize is crucial as it also defines the amount of regularization. Indeed, the regularization parameter lambda is implicitly defined by the stepsize.
Both the stepsize and the noise level of the denoiser control the regularization power and should be tuned to the specific problem.
The following parameters have been chosen manually.
stepsize = 15 * scaling
sigma_denoiser = 0.01
max_iter = 200
early_stop = True
# Select the data fidelity term
data_fidelity = L2()
# Specify the denoising prior
denoiser = DnCNN(
in_channels=n_channels,
out_channels=n_channels,
pretrained="download", # automatically downloads the pretrained weights, set to a path to use custom weights.
device=device,
)
prior = PnP(denoiser=denoiser)
# Logging parameters
verbose = True
plot_convergence_metrics = True # compute performance and convergence metrics along the algorithm, curves saved in RESULTS_DIR
# instantiate the algorithm class to solve the IP problem.
# initialize with the rescaled adjoint such that the initialization lives already at the correct scale
init = lambda y, physics: physics.A_adjoint(y) * scaling
# define the model
model = PGD(
data_fidelity=data_fidelity,
prior=prior,
stepsize=stepsize,
sigma_denoiser=sigma_denoiser,
early_stop=early_stop,
max_iter=max_iter,
verbose=verbose,
custom_init=init,
)
# Set the model to evaluation mode. We do not require training here.
model.eval()
PGD(
(fixed_point): FixedPoint(
(iterator): PGDIteration(
(f_step): fStepPGD()
(g_step): gStepPGD()
)
)
(psnr): PSNR()
)
Evaluate the model on the problem and plot the results.#
The model returns the output and the metrics computed along the iterations.
For computing PSNR, the ground truth image x_gt must be provided.
y = physics(x)
x_lin = (
physics.A_adjoint(y) * scaling
) # rescaled linear reconstruction with the adjoint operator
# run the model on the problem.
with torch.no_grad():
x_model, metrics = model(
y, physics, x_gt=x, compute_metrics=True
) # reconstruction with PnP algorithm
# compute PSNR
print(f"Linear reconstruction PSNR: {dinv.metric.PSNR()(x, x_lin).item():.2f} dB")
print(f"PnP reconstruction PSNR: {dinv.metric.PSNR()(x, x_model).item():.2f} dB")
# plot images. Images are saved in RESULTS_DIR.
imgs = [y, x, x_lin, x_model]
plot(
imgs,
titles=["Input", "GT", "Linear", "Recons."],
save_dir=RESULTS_DIR / "images",
show=True,
)
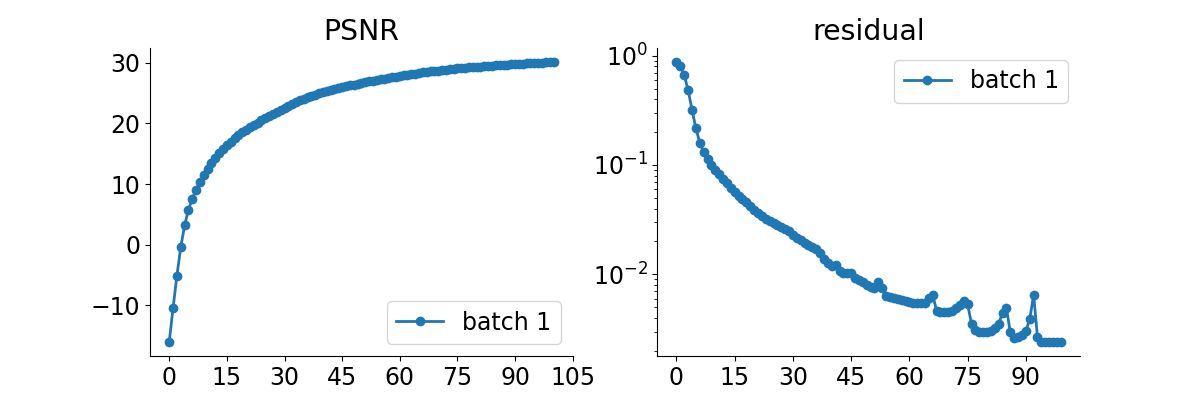
# plot convergence curves. Metrics are saved in RESULTS_DIR.
if plot_convergence_metrics:
plot_curves(metrics, save_dir=RESULTS_DIR / "curves", show=True)
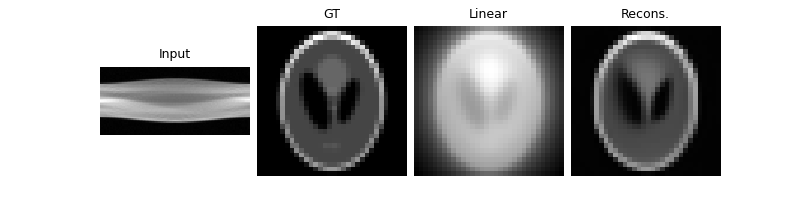
Linear reconstruction PSNR: 14.37 dB
PnP reconstruction PSNR: 28.16 dB
Total running time of the script: (0 minutes 3.379 seconds)