
Note
New to DeepInverse? Get started with the basics with the 5 minute quickstart tutorial..
Inference and fine-tune a foundation model#
This example shows how to perform inference on and fine-tune the Reconstruct Anything Model (RAM) foundation model [1] to solve inverse problems.
The Reconstruct Anything Model is a model that has been trained to work on a large
variety of linear image reconstruction tasks and datasets (deblurring, inpainting, denoising, tomography, MRI, etc.)
and is robust to a wide variety of imaging domains.
Tip
Want to use your own dataset? See Bring your own dataset
Want to use your own physics? See Bring your own physics
import deepinv as dinv
import torch
device = dinv.utils.get_device()
model = dinv.models.RAM(device=device, pretrained=True)
Selected GPU 0 with 8565.25 MiB free memory
1. Zero-shot inference#
First, let’s evaluate the zero-shot inference performance of the foundation model.
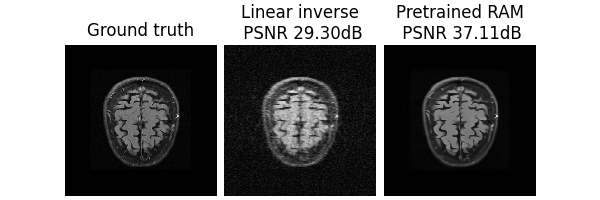
Accelerated medical imaging#
Here, we demonstrated reconstructing brain MRI from an accelerated noisy MRI scan from FastMRI:
x = dinv.utils.load_example("demo_mini_subset_fastmri_brain_0.pt", device=device)
# Define physics
physics = dinv.physics.MRI(noise_model=dinv.physics.GaussianNoise(0.05), device=device)
physics_generator = dinv.physics.generator.GaussianMaskGenerator(
(320, 320), device=device
)
# Generate measurement
y = physics(x, **physics_generator.step())
# Perform inference
with torch.no_grad():
x_hat = model(y, physics)
x_lin = physics.A_adjoint(y)
psnr = dinv.metric.PSNR()
dinv.utils.plot(
{
"Ground truth": x,
f"Linear inverse": x_lin,
f"Pretrained RAM": x_hat,
},
subtitles=[
"PSNR:",
f"{psnr(x, x_lin).item():.2f} dB",
f"{psnr(x, x_hat).item():.2f} dB",
],
figsize=(6, 4),
)
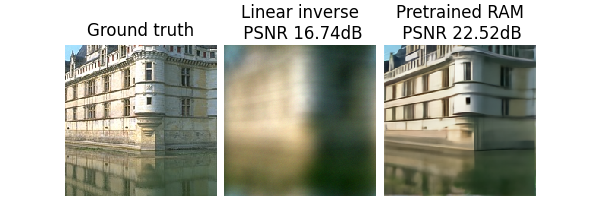
Computational photography#
Joint random motion deblurring and denoising, using a cropped image from color BSD:
x = dinv.utils.load_example("CBSD_0010.png", img_size=(200, 200), device=device)
physics = dinv.physics.BlurFFT(
img_size=x.shape[1:],
noise_model=dinv.physics.GaussianNoise(sigma=0.05),
device=device,
)
# fmt: off
physics_generator = (
dinv.physics.generator.MotionBlurGenerator((31, 31), l=2.0, sigma=2.4, device=device) +
dinv.physics.generator.SigmaGenerator(sigma_min=0.001, sigma_max=0.2, device=device)
)
# fmt: on
y = physics(x, **physics_generator.step())
with torch.no_grad():
x_hat = model(y, physics)
x_lin = physics.A_adjoint(y)
dinv.utils.plot(
{
"Ground truth": x,
f"Linear inverse": x_lin,
f"Pretrained RAM": x_hat,
},
subtitles=[
"PSNR:",
f"{psnr(x, x_lin).item():.2f} dB",
f"{psnr(x, x_hat).item():.2f} dB",
],
figsize=(6, 4),
)
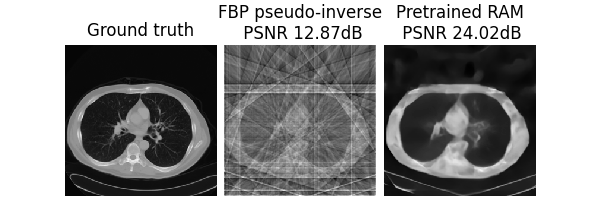
Tomography#
Computed Tomography with limited angles using data from the The Cancer Imaging Archive of lungs:
x = dinv.utils.load_example("CT100_256x256_0.pt", device=device)
physics = dinv.physics.Tomography(
img_width=256,
angles=10,
normalize=True,
device=device,
)
y = physics(x)
with torch.no_grad():
x_hat = model(y, physics)
x_lin = physics.A_dagger(y)
dinv.utils.plot(
{
"Ground truth": x,
f"FBP pseudo-inverse": x_lin,
f"Pretrained RAM": x_hat,
},
subtitles=[
"PSNR:",
f"{psnr(x, x_lin).item():.2f} dB",
f"{psnr(x, x_hat).item():.2f} dB",
],
figsize=(6, 4),
)
/local/jtachell/deepinv/deepinv/deepinv/physics/forward.py:487: UserWarning: Following torch.nn.Module's design, the 'device' attribute is deprecated and will be removed in a future version. To move the module's buffers/parameters to a different device, use the `to()` method.
warnings.warn(
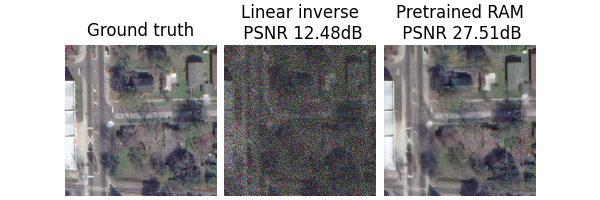
Remote sensing#
Satellite denoising with Poisson-Gaussian noise using urban data from the WorldView-3 satellite over Jacksonville:
x = dinv.utils.load_example("JAX_018_011_RGB.tif", device=device)[..., :300, :300]
physics = dinv.physics.Denoising(
noise_model=dinv.physics.PoissonGaussianNoise(sigma=0.1, gain=0.1)
)
y = physics(x)
with torch.no_grad():
x_hat = model(y, physics)
# Alternatively, use the model without physics:
# x_hat = model(y, sigma=0.1, gain=0.1)
x_lin = physics.A_adjoint(y)
dinv.utils.plot(
{
"Ground truth": x,
f"Linear inverse": x_lin,
f"Pretrained RAM": x_hat,
},
subtitles=[
"PSNR:",
f"{psnr(x, x_lin).item():.2f} dB",
f"{psnr(x, x_hat).item():.2f} dB",
],
figsize=(6, 4),
)
2. Fine-tuning#
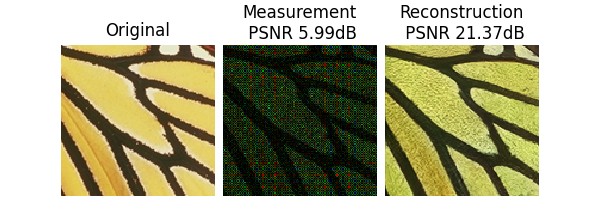
As with all models, there may be a drop in performance when used zero-shot on problems or data outside those seen during training.
For instance, RAM is not trained on image demosaicing:
x = dinv.utils.load_example("butterfly.png", img_size=(127, 129), device=device)
physics = dinv.physics.Demosaicing(
img_size=x.shape[1:], noise_model=dinv.physics.PoissonNoise(0.1), device=device
)
# Generate measurement
y = physics(x)
# Run inference
with torch.no_grad():
x_hat = model(y, physics)
# Show results
dinv.utils.plot(
{
"Original": x,
f"Measurement": y,
f"Reconstruction": x_hat,
},
subtitles=[
"PSNR:",
f"{psnr(x, y).item():.2f} dB",
f"{psnr(x, x_hat).item():.2f} dB",
],
figsize=(6, 4),
)
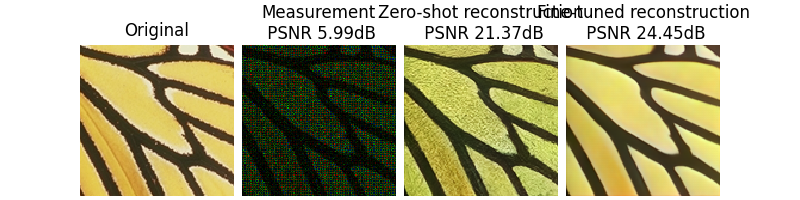
To improve results, we can fine-tune the model on our problem and data, even in the absence of ground truth data, using a self-supervised loss, and even on a single image only.
Here, since this example is run in a no-GPU environment, we will use a small patch of the image to speed up training, but in practice, we can use the full image.
Note
You can also fine-tune on larger datasets if you want, by replacing the dataset.
# Take small patch
x_train = x[..., :64, :64]
physics_train = dinv.physics.Demosaicing(
img_size=x_train.shape[1:],
noise_model=dinv.physics.PoissonNoise(0.1, clip_positive=True),
device=device,
)
y_train = physics_train(x_train)
# Define training loss
losses = [
dinv.loss.R2RLoss(),
dinv.loss.EILoss(dinv.transform.Shift(shift_max=0.4), weight=0.1),
]
dataset = dinv.datasets.TensorDataset(y=y_train)
train_dataloader = torch.utils.data.DataLoader(dataset)
We fine-tune using early stopping on a validation set, again without ground truth. We use a small patch of another set of measurements as validation.
eval_dataloader = torch.utils.data.DataLoader(
dinv.datasets.TensorDataset(
y=physics_train(
dinv.utils.load_example("leaves.png", device=device)[..., :64, :64]
)
)
)
max_epochs = 20
trainer = dinv.Trainer(
model=model,
physics=physics_train,
eval_interval=5,
ckp_interval=max_epochs - 1,
metrics=None,
compute_eval_losses=True, # use self-supervised loss for evaluation
early_stop_on_losses=True, # stop using self-supervised eval loss
early_stop=2, # early stop after 2 evals without improvement
device=device,
losses=losses,
epochs=max_epochs,
optimizer=torch.optim.Adam(model.parameters(), lr=5e-5),
train_dataloader=train_dataloader,
eval_dataloader=eval_dataloader,
show_progress_bar=False, # disable progress bar for better vis in sphinx gallery.
)
finetuned_model = trainer.train()
finetuned_model = trainer.load_best_model()
/local/jtachell/deepinv/deepinv/deepinv/training/trainer.py:1356: UserWarning: non_blocking_transfers=True but DataLoader.pin_memory=False; set pin_memory=True to overlap host-device copies with compute.
self.setup_train()
The model has 35618813 trainable parameters
Train epoch 0: R2RLoss=0.127, EILoss=0.001, TotalLoss=0.129
Eval epoch 0: R2RLoss=0.153, EILoss=0.001, TotalLoss=0.153
Best model saved at epoch 1
Train epoch 1: R2RLoss=0.126, EILoss=0.0, TotalLoss=0.127
Train epoch 2: R2RLoss=0.128, EILoss=0.0, TotalLoss=0.128
Train epoch 3: R2RLoss=0.119, EILoss=0.0, TotalLoss=0.119
Train epoch 4: R2RLoss=0.126, EILoss=0.0, TotalLoss=0.126
Train epoch 5: R2RLoss=0.126, EILoss=0.0, TotalLoss=0.127
Eval epoch 5: R2RLoss=0.151, EILoss=0.001, TotalLoss=0.152
Best model saved at epoch 6
Train epoch 6: R2RLoss=0.124, EILoss=0.0, TotalLoss=0.124
Train epoch 7: R2RLoss=0.129, EILoss=0.0, TotalLoss=0.13
Train epoch 8: R2RLoss=0.121, EILoss=0.0, TotalLoss=0.121
Train epoch 9: R2RLoss=0.138, EILoss=0.0, TotalLoss=0.139
Train epoch 10: R2RLoss=0.129, EILoss=0.0, TotalLoss=0.13
Eval epoch 10: R2RLoss=0.152, EILoss=0.001, TotalLoss=0.153
Train epoch 11: R2RLoss=0.126, EILoss=0.0, TotalLoss=0.127
Train epoch 12: R2RLoss=0.125, EILoss=0.0, TotalLoss=0.125
Train epoch 13: R2RLoss=0.126, EILoss=0.0, TotalLoss=0.126
Train epoch 14: R2RLoss=0.132, EILoss=0.0, TotalLoss=0.132
Train epoch 15: R2RLoss=0.129, EILoss=0.0, TotalLoss=0.129
Eval epoch 15: R2RLoss=0.151, EILoss=0.001, TotalLoss=0.152
Train epoch 16: R2RLoss=0.131, EILoss=0.0, TotalLoss=0.132
Train epoch 17: R2RLoss=0.127, EILoss=0.0, TotalLoss=0.127
Train epoch 18: R2RLoss=0.132, EILoss=0.0, TotalLoss=0.133
Train epoch 19: R2RLoss=0.127, EILoss=0.0, TotalLoss=0.127
Eval epoch 19: R2RLoss=0.151, EILoss=0.001, TotalLoss=0.151
Best model saved at epoch 20
Model, optimizer, epoch_start successfully loaded from checkpoint: 26-05-31-16:25:19/ckp_best.pth.tar
We can now use the fine-tuned model to reconstruct the image from the measurement y.
with torch.no_grad():
x_hat_ft = finetuned_model(y, physics)
# Show results
dinv.utils.plot(
{
"Original": x,
f"Measurement": y,
f"Zero-shot \nReconstruction": x_hat,
f"Fine-tuned \nReconstruction": x_hat_ft,
},
subtitles=[
"PSNR:",
f"{psnr(y, x).item():.2f} dB",
f"{psnr(x, x_hat).item():.2f} dB",
f"{psnr(x, x_hat_ft).item():.2f} dB",
],
figsize=(6, 4),
)
- References:
Total running time of the script: (0 minutes 33.134 seconds)