
Note
New to DeepInverse? Get started with the basics with the 5 minute quickstart tutorial..
Single-pixel imaging with Spyrit#
This example shows how to use Spyrit linear models and measurements with DeepInverse. Here we use the HadamSplit2d linear model from Spyrit.
Load images#
We start by loading the butterfly image using func:deepinv.utils.load_example:
import torch.nn
from deepinv.utils import plot
import deepinv as dinv
device = dinv.utils.get_freer_gpu() if torch.cuda.is_available() else "cpu"
im_size = 64
x = dinv.utils.load_example(
"butterfly.png", device=device, img_size=(im_size, im_size), grayscale=True
)
print(f"Ground-truth image: {x.shape}")
Selected GPU 0 with 1607.25 MiB free memory
Ground-truth image: torch.Size([1, 1, 64, 64])
Then we plot it:
Basic example#
We instantiate an HadamSplit2d object and simulate the 2D hadamard transform of the input images. Reshape output is necesary for deepinv. We also add Poisson noise.
from spyrit.core.meas import HadamSplit2d
from spyrit.core.prep import UnsplitRescale
physics_spyrit = HadamSplit2d(im_size, 512, device=device, reshape_output=True)
y_spyrit = physics_spyrit(x)
# preprocess
prep = UnsplitRescale(alpha=1.0)
y_spyrit = prep(y_spyrit)
print(y_spyrit.shape)
/local/jtachell/deepinv/deepinv/.pixi/envs/docs/lib/python3.12/site-packages/spyrit/core/warp.py:3: SyntaxWarning: invalid escape sequence '\i'
a deformation field. Let :math:`t_0 \in \mathbb{R}_+`,
torch.Size([1, 1, 512])
The norm has to be computed to be passed to deepinv. We need to use the max singular value of the linear operator.
tensor(64.0010, device='cuda:0')
Forward operator#
You can direcly give the forward operator to deepinv. You can also add noise using deepinv model or spyrit model.
physics_deepinv = dinv.physics.LinearPhysics(
lambda y: physics_spyrit.measure_H(y) / norm,
A_adjoint=lambda y: physics_spyrit.unvectorize(physics_spyrit.adjoint_H(y) / norm),
)
y_deepinv = physics_deepinv(x)
print("diff:", torch.linalg.norm(y_spyrit / norm - y_deepinv))
diff: tensor(2.4365e-05, device='cuda:0')
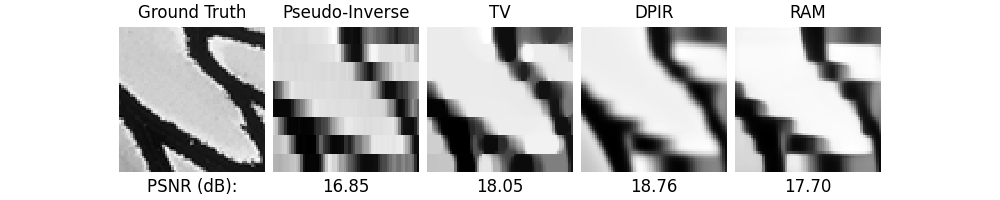
Computing the reconstructions#
All of the usual solvers work out of the box and we showcase some of them here starting with simple linear reconstructions using deepinv.physics.LinearPhysics.A_adjoint() and deepinv.physics.LinearPhysics.A_dagger():
You can also use optimization-based methods from deepinv. Here, we use Total Variation (TV) regularization with a projected gradient descent (PGD) algorithm. You can note the use of the custom_init parameter to initialize the algorithm with the dagger operator.
model_tv = dinv.optim.optim_builder(
iteration="PGD",
prior=dinv.optim.TVPrior(),
data_fidelity=dinv.optim.L2(),
params_algo={"stepsize": 1, "lambda": 5e-2},
max_iter=10,
custom_init=lambda y, Physics: {"est": (Physics.A_dagger(y),)},
)
x_tv, metrics_TV = model_tv(
y_spyrit / norm, physics_deepinv, compute_metrics=True, x_gt=x
)
And so do deep learning methods:
denoiser = dinv.models.DRUNet(in_channels=1, out_channels=1, device=device)
model_dpir = dinv.optim.DPIR(sigma=1e-1, device=device, denoiser=denoiser)
model_dpir.custom_init = lambda y, Physics: {"est": (Physics.A_dagger(y),)}
with torch.no_grad():
x_dpir = model_dpir(y_spyrit / norm, physics_deepinv)
Including reconstruction with deepinv.models.RAM:
model_ram = dinv.models.RAM(pretrained=True, device=device)
model_ram.sigma_threshold = 1e-1
with torch.no_grad():
x_ram = model_ram(y_spyrit / norm, physics_deepinv)
metric = dinv.metric.PSNR()
psnr_y = 0
psnr_pinv = metric(x_pinv, x).item()
psnr_tv = metric(x_tv, x).item()
psnr_dpir = metric(x_dpir, x).item()
psnr_ram = metric(x_ram, x).item()
dinv.utils.plot(
{
"Ground Truth": x,
"Pseudo-Inverse": x_pinv,
"TV": x_tv,
"DPIR": x_dpir,
"RAM": x_ram,
},
subtitles=[
"PSNR (dB):",
f"{psnr_pinv:.2f}",
f"{psnr_tv:.2f}",
f"{psnr_dpir:.2f}",
f"{psnr_ram:.2f}",
],
)
Total running time of the script: (0 minutes 16.640 seconds)