
PoissonNoise#
- class deepinv.physics.PoissonNoise(gain=1.0, normalize=True, clip_positive=False, rng=None)[source]#
Bases:
NoiseModelPoisson noise \(y = \mathcal{P}(\frac{x}{\gamma})\) with gain \(\gamma>0\).
If
normalize=True, the output is multiplied by the gain, i.e., \(\tilde{y} = \gamma y\).- Parameters:
gain (Union[float, torch.Tensor]) – gain of the noise.
normalize (bool) – normalize the output.
clip_positive (bool) – clip the input to be positive before adding noise. This may be needed when a NN outputs negative values e.g. when using leaky ReLU.
rng (torch.Generator, None) – (optional) a pseudorandom random number generator for the parameter generation.
Note
Poisson noise is only defined for non-negative inputs. When used in combination with physics operators that can produce negative outputs (such as
deepinv.physics.BlurFFT), it is recommended to setclip_positive=Trueto avoid runtime errors.Tip
All pretrained denoisers in the library can be re-used for Poisson denoising using the
Anscombe transform.
- Examples:
Adding Poisson noise to a physics operator by setting the
noise_modelattribute of the physics operator:>>> from deepinv.physics import Denoising, PoissonNoise >>> import torch >>> physics = Denoising() >>> physics.noise_model = PoissonNoise() >>> x = torch.rand(1, 1, 2, 2) >>> y = physics(x)
- forward(x, gain=None, seed=None, **kwargs)[source]#
Adds the noise to measurements x
- Parameters:
x (torch.Tensor) – measurements
gain (None, float, torch.Tensor) – gain of the noise. If not None, it will overwrite the current noise level.
seed (int) – the seed for the random number generator, if
rngis provided.
- Returns:
noisy measurements
Examples using PoissonNoise:#

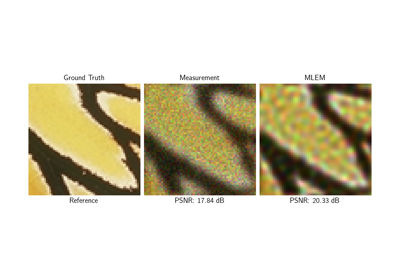
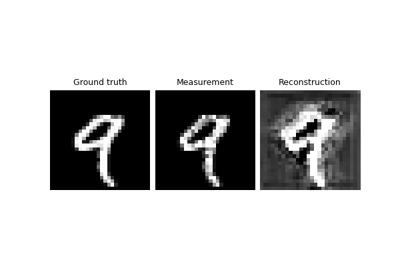
Poisson Inverse Problems with Maximum-Likelihood Expectation-Maximization (MLEM)
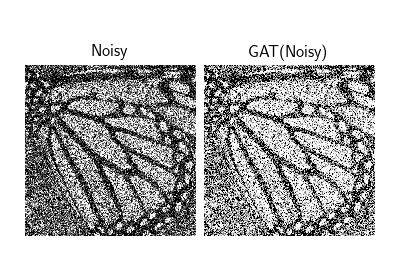
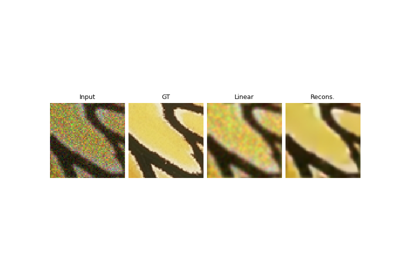
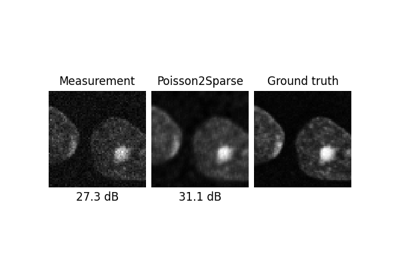
Poisson-Gaussian Denoising with the Generalized Anscombe Transform

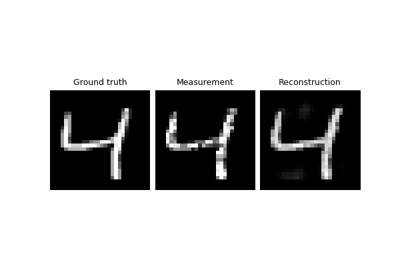
Plug-and-Play algorithm with Mirror Descent for Poisson noise inverse problems.
Self-supervised denoising with the Neighbor2Neighbor loss.
Self-supervised denoising with the Generalized R2R loss.
