
PoissonGaussianNoise#
- class deepinv.physics.PoissonGaussianNoise(gain=1.0, sigma=0.1, clip_positive=False, min_gain=1e-12, rng=None)[source]#
Bases:
NoiseModelPoisson-Gaussian noise \(y = \gamma z + \epsilon\) where \(z\sim\mathcal{P}(\frac{x}{\gamma})\) and \(\epsilon\sim\mathcal{N}(0, I \sigma^2)\).
This noise model allows to recover the Poisson noise model by setting the standard deviation to zero, i.e., \(\sigma=0\), and the Gaussian noise model by setting the gain to zero, i.e., \(\gamma\to0\).
Note
If \(\gamma=0\), the model will clamp the input to a small value to avoid division by zero, i.e., \(\gamma=\max(\gamma, \text{min\_gain})\).
Tip
All pretrained denoisers in the library can be re-used for Poisson-Gaussian denoising using the
Anscombe transform.- Parameters:
gain (Union[float, torch.Tensor]) – gain of the noise.
sigma (Union[float, torch.Tensor]) – Standard deviation of the noise.
clip_positive (bool) – (optional) if True, the input is clipped to be positive before adding noise.
rng (torch.Generator, None) – (optional) a pseudorandom random number generator for the parameter generation.
- Examples:
Adding Poisson gaussian noise to a physics operator by setting the
noise_modelattribute of the physics operator:>>> from deepinv.physics import Denoising, PoissonGaussianNoise >>> import torch >>> physics = Denoising() >>> physics.noise_model = PoissonGaussianNoise() >>> x = torch.rand(1, 1, 2, 2) >>> y = physics(x)
- forward(x, gain=None, sigma=None, seed=None, **kwargs)[source]#
Adds the noise to measurements x
- Parameters:
x (torch.Tensor) – measurements
gain (None, float, torch.Tensor) – gain of the noise. If not None, it will overwrite the current gain.
sigma (None, float, torch.Tensor) – Tensor containing gain and standard deviation. If not None, it will overwrite the current gain and standard deviation.
seed (int) – the seed for the random number generator, if
rngis provided.
- Returns:
noisy measurements
Examples using PoissonGaussianNoise:#

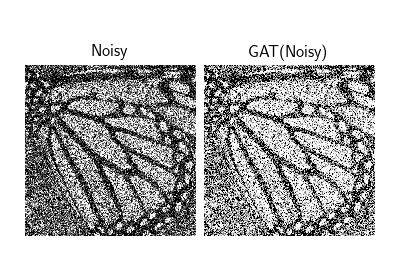
Poisson-Gaussian Denoising with the Generalized Anscombe Transform
