Denoising#
- class deepinv.physics.Denoising(noise_model=None, device='cpu', **kwargs)[source]#
Bases:
DecomposablePhysicsForward operator for denoising problems.
The linear operator is just the identity mapping \(A(x)=x\)
- Parameters:
noise (torch.nn.Module) – noise distribution, e.g.,
deepinv.physics.GaussianNoise, or a user-defined torch.nn.Module. By default, it is set to Gaussian noise with a standard deviation of 0.1.device (torch.device, str) – cpu or cuda, every registered buffer and module parameters are recursively pushed onto the device during initialization.
- Examples:
Denoising operator with Gaussian noise with standard deviation 0.1:
>>> from deepinv.physics import Denoising, GaussianNoise >>> seed = torch.manual_seed(0) # Random seed for reproducibility >>> x = 0.5*torch.randn(1, 1, 3, 3) # Define random 3x3 image >>> physics = Denoising(GaussianNoise(sigma=0.1)) >>> with torch.no_grad(): ... physics(x) tensor([[[[ 0.7302, -0.2064, -1.0712], [ 0.1985, -0.4322, -0.8064], [ 0.2139, 0.3624, -0.3223]]]])
Examples using Denoising:#

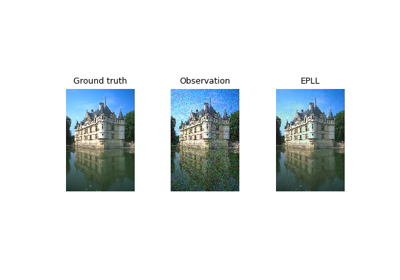
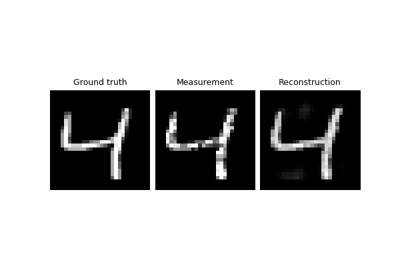
Expected Patch Log Likelihood (EPLL) for Denoising and Inpainting
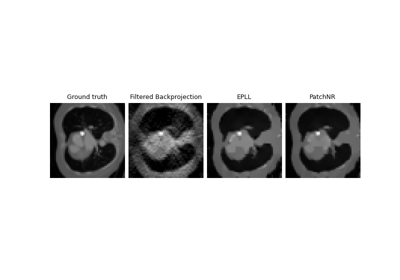
Patch priors for limited-angle computed tomography
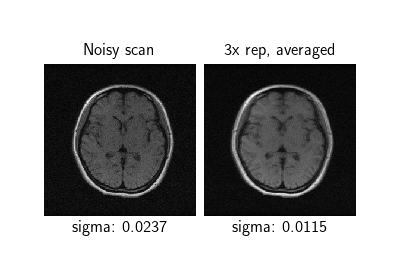
Poisson-Gaussian Denoising with the Generalized Anscombe Transform

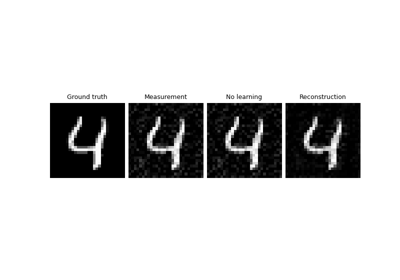
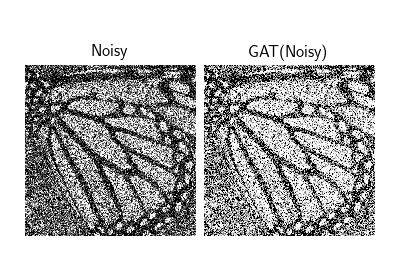
Self-supervised denoising with the Neighbor2Neighbor loss.
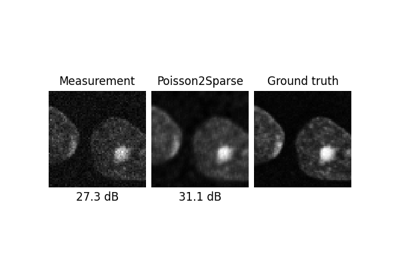
Self-supervised denoising with the Generalized R2R loss.