
R2RLoss#
- class deepinv.loss.R2RLoss(metric=None, noise_model=None, alpha=0.15, eval_n_samples=5)[source]#
Bases:
LossGeneralized Recorrupted-to-Recorrupted (GR2R) Loss
This self-supervised loss can be used when the noise model is Gaussian, Poisson, Gamma or Binomial. The GR2R loss is defined as:
\[y_1 \sim p(y_1 \vert y, \alpha),\]where
Noise Model
\(p(y_1 \vert y,\alpha)\)
\(y \sim \mathcal{N}(x, I\sigma^2)\)
\(y_1 = y + \sqrt{\frac{\alpha}{1-\alpha}} \boldsymbol{\omega}, \quad \boldsymbol{\omega} \sim \mathcal{N}(0, I\sigma^2)\)
\(z \sim \mathcal{P}(x/\gamma), \quad y = \gamma z\)
\(y_1 = \frac{y - \gamma \boldsymbol{\omega}}{1 - \alpha}, \quad \boldsymbol{\omega} \sim \mathrm{Bin}(z, \alpha)\)
\(y \sim \mathcal{G}(\ell, \ell / x)\)
\(y_1 = y \circ (\mathbf{1} - \boldsymbol{\omega}) / (1 - \alpha), \quad \boldsymbol{\omega} \sim \mathrm{Beta}(\ell\alpha, \ell(1 - \alpha))\)
\(z \sim \mathrm{Bin}(\ell, x), \quad y = z / \ell\)
\(y_1 = \frac{y - \boldsymbol{\omega} / \ell}{1 - \alpha}, \quad \boldsymbol{\omega} \sim \mathrm{HypGeo}(\ell, \ell\alpha, z)\)
and
\[y_2 = \frac{1}{\alpha} \left( y - y_1(1-\alpha) \right),\]then, the loss is computed as:
\[\| AR(y_1) - y_2 \|_2^2,\]where, \(R\) is the trainable network, \(A\) is the forward operator, \(y\) is the noisy measurement, and \(\alpha\) is a scaling factor.
The loss was first introduced by Pang et al.[1] for the specific case of Gaussian noise, formalizing the Noise2Noisier loss from Moran et al.[2], such that it is statistically equivalent to the supervised loss function defined on noisy/clean image pairs. The loss was later extended to other exponential family noise distributions by Monroy et al.[3], including Poisson, Gamma and Binomial noise distributions.
Warning
The model should be adapted before training using the method
adapt_model()to include the additional noise at the input.Note
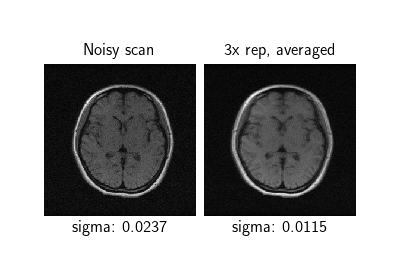
To obtain the best test performance, the trained model should be averaged at test time over multiple realizations of the added noise, i.e. \(\hat{x} = \frac{1}{N}\sum_{i=1}^N R(y_1^{(i)})\), where \(N>1\). This can be achieved using
adapt_model().Note
If the
noise_modelparameter is not provided, the noise model from the physics module will be used.- Parameters:
metric (Metric, torch.nn.Module) – Metric for calculating loss, defaults to MSE.
noise_model (NoiseModel) – Noise model of the natural exponential family, defaults to None. Implemented options are
deepinv.physics.GaussianNoise,deepinv.physics.PoissonNoiseanddeepinv.physics.GammaNoisealpha (float) – Scaling factor of the corruption.
eval_n_samples (int) – Number of samples used for the Monte Carlo approximation.
- Example:
>>> import torch >>> import deepinv as dinv >>> sigma = 0.1 >>> noise_model = dinv.physics.GaussianNoise(sigma) >>> physics = dinv.physics.Denoising(noise_model) >>> model = dinv.models.MedianFilter() >>> loss = dinv.loss.R2RLoss(noise_model=noise_model, eval_n_samples=2) >>> model = loss.adapt_model(model) # important step! >>> x = torch.ones((1, 1, 8, 8)) >>> y = physics(x) >>> x_net = model(y, physics, update_parameters=True) # save extra noise in forward pass >>> l = loss(x_net, y, physics, model) >>> print(l.item() > 0) True
- References:
- adapt_model(model, **kwargs)[source]#
Adds noise to model input.
This method modifies a reconstruction model \(R\) to include the re-corruption mechanism at the input:
\[\hat{R}(y) = \frac{1}{N}\sum_{i=1}^N R(y_1^{(i)}),\]where \(y_1^{(i)} \sim p(y_1 \vert y, \alpha)\) are i.i.d samples, and \(N\geq 1\) are the number of samples used for the Monte Carlo approximation. During training (i.e. when
model.train()), we use only one sample, i.e. \(N=1\) for computational efficiency, whereas at test time, we use multiple samples for better performance.- Parameters:
model (torch.nn.Module) – Reconstruction model.
noise_model (NoiseModel) – Noise model of the natural exponential family. Implemented options are
deepinv.physics.GaussianNoise,deepinv.physics.PoissonNoiseanddeepinv.physics.GammaNoisealpha (float) – Scaling factor of the corruption.
- Returns:
(
torch.nn.Module) Modified model.
- forward(x_net, y, physics, model, **kwargs)[source]#
Computes the GR2R Loss.
- Parameters:
y (torch.Tensor) – Measurements.
physics (deepinv.physics.Physics) – Forward operator associated with the measurements.
model (torch.nn.Module) – Reconstruction model.
- Returns:
(
torch.Tensor) R2R loss.
Examples using R2RLoss:#

Self-supervised learning with Equivariant Splitting
Self-supervised denoising with the Generalized R2R loss.