
Note
New to DeepInverse? Get started with the basics with the 5 minute quickstart tutorial..
Poisson-Gaussian Denoising with the Generalized Anscombe Transform#
This example demonstrates how to denoise images corrupted by
Poisson-Gaussian noise using the
Generalized Anscombe Transform (GAT), which
converts any Gaussian denoiser into a Poisson-Gaussian denoiser [1].
We compare three approaches on a butterfly image:
DRUNet baseline – the pretrained
DRUNetGaussian denoiser applied directly to the noisy measurement, using a global noise-level heuristic.DRUNet with spatial noise maps – the pretrained
DRUNetconditioned on spatial noise levels, which capture the variance of the Poisson-Gaussian noise at each pixel.Anscombe + DRUNet – the same DRUNet wrapped with
AnscombeDenoiser, which first variance-stabilizes the heteroscedastic Poisson-Gaussian noise via the GAT.
Background#
The Poisson-Gaussian noise model arises naturally in photon-counting imaging systems (fluorescence microscopy, astronomy, low-light photography), where the observed measurement \(y\) satisfies
with photon gain \(\gamma > 0\) and read-out noise level \(\sigma \geq 0\).
The Generalized Anscombe Transform (GAT) stabilizes the variance of the Poisson-Gaussian noise to approximately \(\gamma^2\):
After applying the GAT the signal approximately follows a Gaussian distribution of standard deviation \(\gamma\), so any Gaussian denoiser trained at noise level \(\sigma_d=\gamma\). The inverse GAT maps back to the original domain. Setting \(u = z / \gamma\), it reads:
The full pipeline of AnscombeDenoiser
reads:
Note
The formula varies slightly from the one proposed by Makitalo and Foi[1], as the library considers a normalized Poisson-Gaussian noise model, \(y = \gamma \mathcal{P}(x/\gamma) + \epsilon\), whereas the authors consider \(y = \gamma \mathcal{P}(x) + \epsilon\).
import torch
import deepinv as dinv
from deepinv.models import AnscombeDenoiser, DRUNet, PatchCovarianceNoiseEstimator
from deepinv.utils import load_example
device = dinv.utils.get_device()
torch.manual_seed(0)
Selected GPU 0 with 6511.25 MiB free memory
<torch._C.Generator object at 0x7fc5b53fca30>
Load a clean butterfly image#
x = load_example("butterfly.png", device=device, grayscale=True)
Case 1: Poisson noise#
In the pure Poisson model, the observed measurement \(y\) satisfies
where \(\mathcal{P}(\lambda)\) denotes a Poisson random variable with rate \(\lambda\), \(x \geq 0\) is the clean image, and \(\gamma > 0\) is the photon gain. The variance of \(y\) is signal-dependent: \(\mathrm{Var}(y_i) = \gamma \, x_i\), making the noise heteroscedastic.
gain = 0.3 # photon gain gamma
physics_poisson = dinv.physics.Denoising(
dinv.physics.PoissonNoise(gain=gain, clip_positive=True),
device=device,
)
y_poisson = physics_poisson(x)
Verifying variance stabilization with the Anscombe transform#
A key property of the GAT is that, after applying it to a Poisson-noisy image,
the resulting signal is approximately Gaussian with a constant standard
deviation equal to the gain \(\gamma\). We can verify this empirically by
running a blind Gaussian noise-level estimator
(PatchCovarianceNoiseEstimator)
on the transformed image: the estimated \(\hat{\sigma}\) should be close to
\(\gamma\).
with torch.no_grad():
z = dinv.models.anscombe.generalized_anscombe_transform(
y_poisson, gain=gain, sigma=0.0
)
sigma_est = PatchCovarianceNoiseEstimator()(z)
print(
f"Estimated noise level after Anscombe transform: {sigma_est.item():.4f} (expected ≈ gain = {gain:.4f})"
)
dinv.utils.plot([y_poisson, z], ["Noisy", "GAT(Noisy)"], rescale_mode="clip")
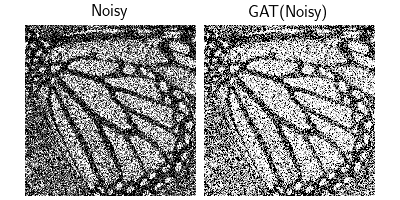
Estimated noise level after Anscombe transform: 0.2692 (expected ≈ gain = 0.3000)
Set up the Anscombe-wrapped DRUNet denoiser#
DRUNet is a powerful Gaussian denoiser.
We wrap it with AnscombeDenoiser
to lift it to the Poisson-Gaussian domain. The GAT output has standard deviation
approximately \(\gamma\), so the wrapper calls DRUNet at noise level \(\gamma\).
drunet = DRUNet(in_channels=1, out_channels=1, device=device)
anscombe_denoiser = AnscombeDenoiser(drunet)
Set up the plain DRUNet baselines (no Anscombe transform)#
As baselines we apply DRUNet directly to the noisy measurement, using a noise-level heuristic derived from the Poisson-Gaussian variance. For Poisson-Gaussian noise, \(\mathrm{Var}(y_i) \approx \gamma x_i + \sigma^2\), so a reasonable single-number estimate of the noise standard deviation is:
For pure Poisson noise (\(\sigma = 0\)) this reduces to \(\sigma_i = \sqrt{(y_i + \frac{3}{8}\gamma) \cdot \gamma}\).
We can construct two baselines with this approximation
Global average – the spatially averaged noise standard deviation \(\bar{\sigma} = \mathrm{mean}_i(\sigma_i)\) is applied uniformly to all pixels.
Space-varying noise maps – each pixel gets its own noise level \(\sigma_i\), which is fed to DRUNet as a spatial noise map.
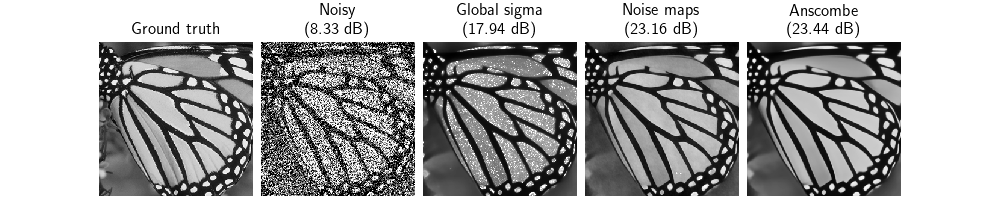
Denoise – pure Poisson scenario#
We first evaluate all methods on the pure Poisson case with \(\gamma=0.3\) and \(\sigma=0\)
with torch.no_grad():
# Anscombe + DRUNet
x_hat_anscombe_poisson = anscombe_denoiser(y_poisson, gain=gain, sigma=1e-6)
# Plain DRUNet with space-varying approximate noise maps
sigma_approx_poisson = ((3 / 8 * gain + y_poisson) * gain).clamp(min=1e-6) ** 0.5
x_hat_drunet_poisson = drunet(y_poisson, sigma_approx_poisson)
# Plain DRUNet with global (spatially averaged) noise level
sigma_global_poisson = sigma_approx_poisson.mean() * torch.ones_like(
sigma_approx_poisson
)
x_hat_drunet_global_poisson = drunet(y_poisson, sigma_global_poisson)
psnr = dinv.metric.PSNR()
# compute PSNR metrics
psnr_noisy_poisson = psnr(y_poisson, x).item()
psnr_anscombe_poisson = psnr(x_hat_anscombe_poisson, x).item()
psnr_drunet_poisson = psnr(x_hat_drunet_poisson, x).item()
psnr_drunet_global_poisson = psnr(x_hat_drunet_global_poisson, x).item()
dinv.utils.plot(
[
x,
y_poisson,
x_hat_drunet_global_poisson,
x_hat_drunet_poisson,
x_hat_anscombe_poisson,
],
titles=[
"Ground truth",
f"Noisy\n({psnr_noisy_poisson:.2f} dB)",
f"Global sigma\n({psnr_drunet_global_poisson:.2f} dB)",
f"Noise maps\n({psnr_drunet_poisson:.2f} dB)",
f"Anscombe\n({psnr_anscombe_poisson:.2f} dB)",
],
rescale_mode="clip",
)
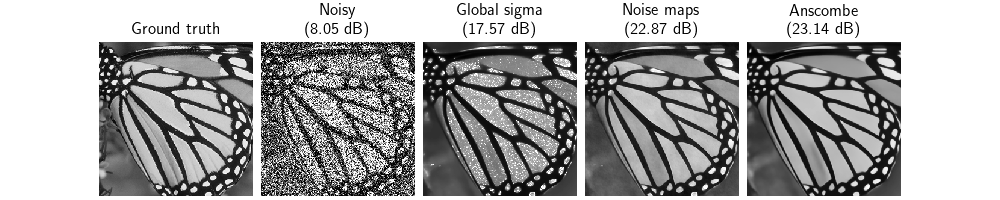
Case 2: Mixed Poisson-Gaussian noise#
Secondly, we evaluate all methods on the pure Poisson case with \(\gamma=0.3\) and \(\sigma=0.1\)
sigma_pg = 0.1 # Gaussian read-out noise sigma
physics_pg = dinv.physics.Denoising(
dinv.physics.PoissonGaussianNoise(gain=gain, sigma=sigma_pg, clip_positive=True),
device=device,
)
y_pg = physics_pg(x)
with torch.no_grad():
# Anscombe + DRUNet
x_hat_anscombe_pg = anscombe_denoiser(y_pg, gain=gain, sigma=sigma_pg)
# Plain DRUNet with space-varying approximate noise maps
sigma_approx_maps_pg = ((gain * 3 / 8 + y_pg) * gain + sigma_pg**2).clamp(
min=1e-6
) ** 0.5
x_hat_drunet_pg = drunet(y_pg, sigma_approx_maps_pg)
# Plain DRUNet with global (spatially averaged) noise level
sigma_global_pg = sigma_approx_maps_pg.mean() * torch.ones_like(
sigma_approx_maps_pg
)
x_hat_drunet_global_pg = drunet(y_pg, sigma_global_pg)
# compute PSNR metrics
psnr_noisy_pg = psnr(y_pg, x).item()
psnr_anscombe_pg = psnr(x_hat_anscombe_pg, x).item()
psnr_drunet_pg = psnr(x_hat_drunet_pg, x).item()
psnr_drunet_global_pg = psnr(x_hat_drunet_global_pg, x).item()
dinv.utils.plot(
[x, y_pg, x_hat_drunet_global_pg, x_hat_drunet_pg, x_hat_anscombe_pg],
titles=[
"Ground truth",
f"Noisy\n({psnr_noisy_pg:.2f} dB)",
f"Global sigma\n({psnr_drunet_global_pg:.2f} dB)",
f"Noise maps\n({psnr_drunet_pg:.2f} dB)",
f"Anscombe\n({psnr_anscombe_pg:.2f} dB)",
],
rescale_mode="clip",
)
Conclusion#
All three DRUNet variants successfully suppress the Poisson-Gaussian noise.
DRUNet with global sigma – uses a single spatially-averaged noise level This is the simplest baseline; it treats the noise as spatially uniform.
DRUNet with noise maps – feeds a per-pixel noise-level map to DRUNet, providing spatial heteroscedasticity information but still operating in the original domain.
AnscombeDenoiseris a zero-cost upgrade: wrap any off-the-shelf Gaussian denoiser to handle Poisson-Gaussian noise without re-training, by properly stabilizing the heteroscedastic Poisson variance via the GAT before denoising.
- References:
Total running time of the script: (0 minutes 2.450 seconds)