
generalized_anscombe_transform#
- deepinv.models.generalized_anscombe_transform(x, gain, sigma)[source]#
Generalized Anscombe Transform (GAT)
The transform converts a noisy observation \(y\) from a
Poisson-Gaussian distributionwith gain \(\gamma\) andGaussian noisestandard deviation \(\sigma\) to an approximately Gaussian distribution with variance \(\gamma\), see Makitalo and Foi[1].The transform is defined as:
\[h(y) = 2 \sqrt{\gamma x + \frac{3}{8}\gamma^2 + \sigma^2}\]Note
The formula varies slightly from the one proposed by Makitalo and Foi[1], as the library considers a normalized Poisson-Gaussian noise model, \(y = \gamma \mathcal{P}(x/\gamma) + \epsilon\), whereas the authors consider \(y = \gamma \mathcal{P}(x) + \epsilon\).
- Parameters:
x (torch.Tensor) – tensor corrupted with Poisson-Gaussian noise
gain (float | torch.Tensor) – Gain of the Poisson distribution \(\gamma\)
sigma (float | torch.Tensor) – Standard deviation of the Gaussian noise \(\sigma\)
- Return torch.Tensor:
Transformed measurements
- References:
Examples using generalized_anscombe_transform:#
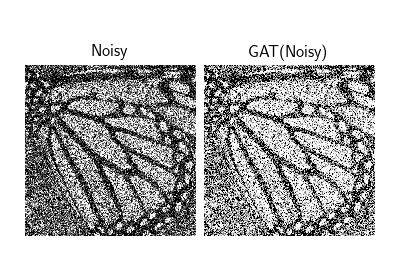
Poisson-Gaussian Denoising with the Generalized Anscombe Transform