ArtifactRemoval#
- class deepinv.models.ArtifactRemoval(backbone_net, mode='adjoint', ckpt_path=None, device=None)[source]#
Bases:
ReconstructorArtifact removal architecture.
Transforms a denoiser \(\phi\) into a reconstruction network \(R\) by doing
Adjoint: \(\inversef{y}{A}=\phi(A^{\top}y)\) with
mode='adjoint'.Pseudoinverse: \(\inversef{y}{A}=\phi(A^{\dagger}y)\) with
mode='pinv'.Direct: \(\inversef{y}{A}=\phi(y)\) with
mode='direct'.
Note
In the case of
mode='pinv', the architecture is inspired by the FBPConvNet approach Jin et al.[1] where a deep network \(\phi\) is used to improve the filtered back projection \(A^{\dagger}y\).- Parameters:
backbone_net (deepinv.models.Denoiser, torch.nn.Module) – Base denoiser network \(\phi\) (see Denoisers for available architectures).
mode (str) – Reconstruction mode. Options are ‘direct’, ‘adjoint’ or ‘pinv’.
device (torch.device) – cpu or gpu.
- References:
- backbone_inference(tensor_in, physics, y, **kwargs)[source]#
Perform inference on the backbone network.
By default, treats backbone network as a denoiser. Override for different inference e.g. for an unrolled network.
- Parameters:
tensor_in (torch.Tensor) – input tensor as dictated by ArtifactRemoval mode
physics (Physics) – forward physics
y (torch.Tensor) – input measurements y
- Returns:
reconstructed image
- Return type:
- forward(y, physics, **kwargs)[source]#
Reconstructs a signal estimate from measurements y
- Parameters:
y (torch.Tensor) – measurements
physics (deepinv.physics.Physics) – forward operator
kwargs (dict) – additional keyword arguments for the backbone network.
- Returns:
reconstructed image
- Return type:
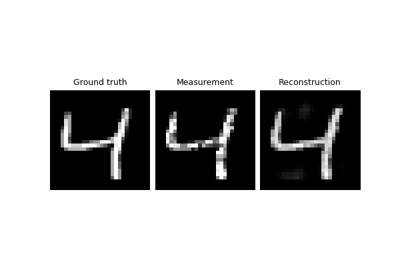
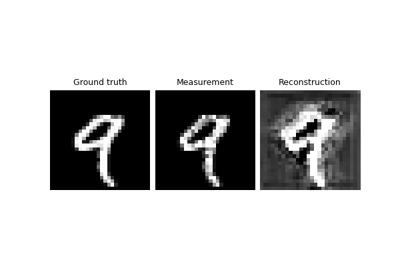
Examples using ArtifactRemoval:#
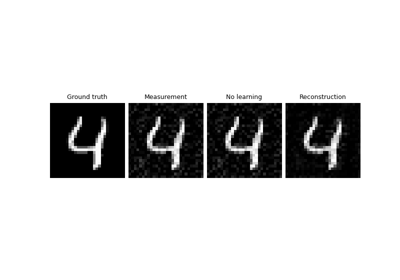
Self-supervised learning from incomplete measurements of multiple operators.
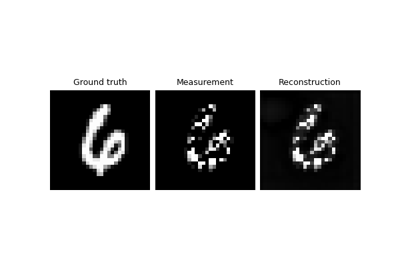
Self-supervised denoising with the Neighbor2Neighbor loss.
Self-supervised denoising with the Generalized R2R loss.
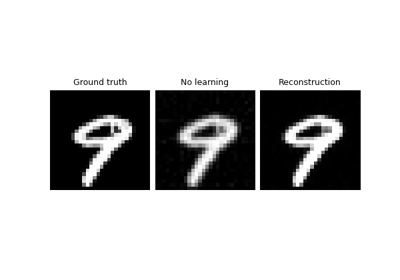
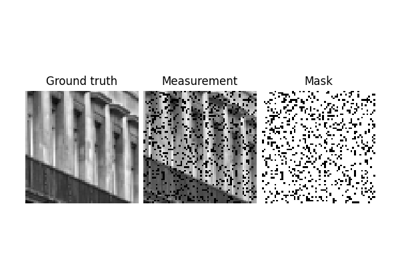
Self-supervised learning with measurement splitting