Reconstructor#
- class deepinv.models.Reconstructor(device='cpu')[source]#
Bases:
ModuleBase class for reconstruction models.
Provides a template for defining reconstruction models.
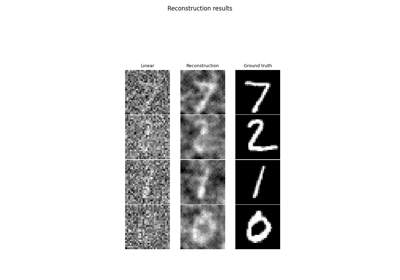
Reconstructors provide a signal estimate
x_hatasx_hat = model(y, physics)whereyare the measurements andphysicsis the forward model \(A\) (possibly including information about the noise distribution too).The base class inherits from
torch.nn.Module.- forward(y, physics, **kwargs)[source]#
Applies reconstruction model \(\inversef{y}{A}\).
- Parameters:
y (torch.Tensor) – measurements.
physics (deepinv.physics.Physics) – forward model \(A\).
- Returns:
reconstructed images.
- Return type:
Examples using Reconstructor:#
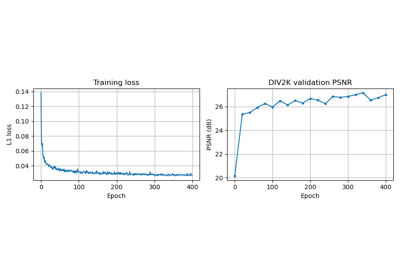
Imaging inverse problems with adversarial networks
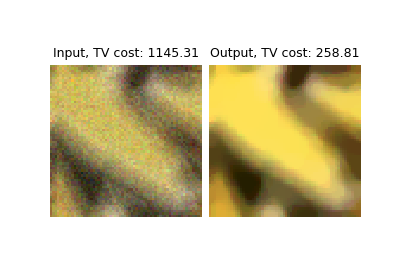
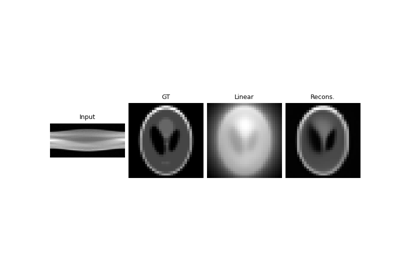
Low-dose CT with ASTRA backend and Total-Variation (TV) prior


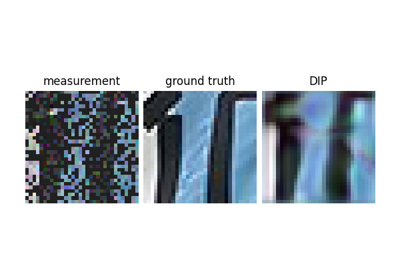
Reconstructing an image using the deep image prior.
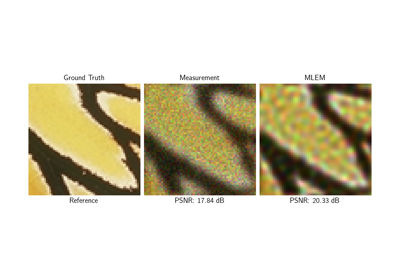
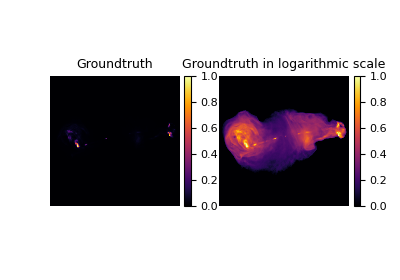
Poisson Inverse Problems with Maximum-Likelihood Expectation-Maximization (MLEM)

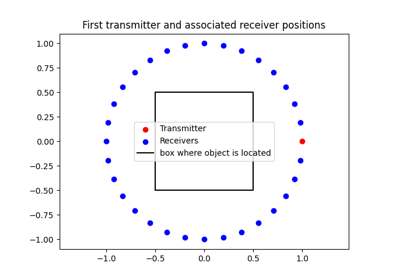
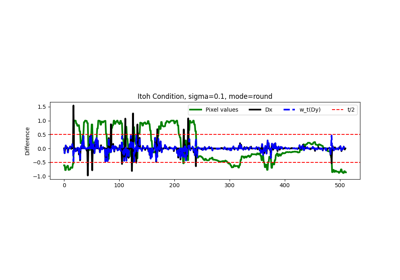
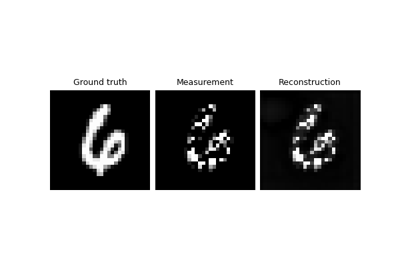
Random phase retrieval and reconstruction methods.
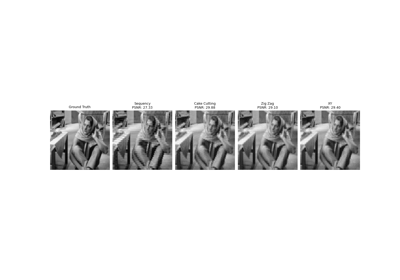
Pattern Ordering in a Compressive Single Pixel Camera
PnP with custom optimization algorithm (Primal-Dual Condat-Vu)
Plug-and-Play algorithm with Mirror Descent for Poisson noise inverse problems.
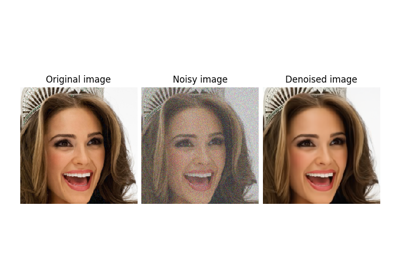
Regularization by Denoising (RED) for Super-Resolution.

Using state-of-the-art diffusion models from HuggingFace Diffusers with DeepInverse
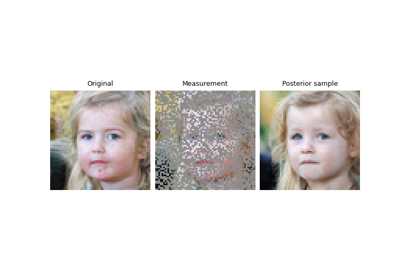
Building your diffusion posterior sampling method using SDEs

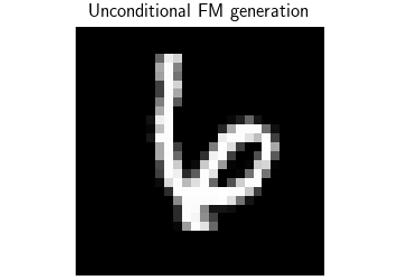
Flow-Matching for posterior sampling and unconditional generation
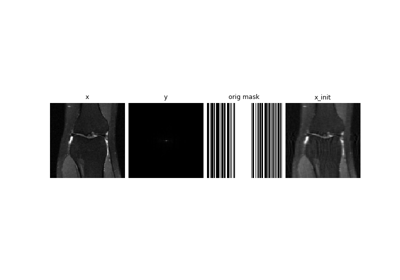
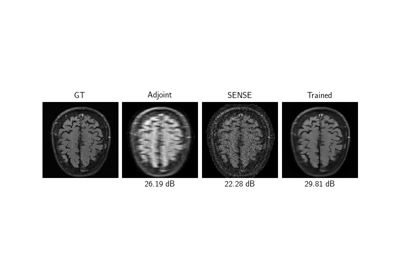
Self-supervised MRI reconstruction with Artifact2Artifact
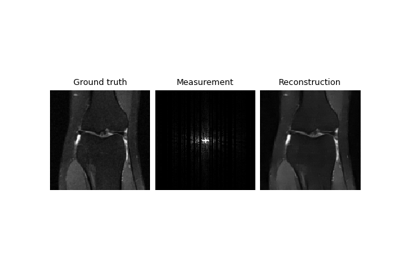
Self-supervised learning with Equivariant Imaging for MRI.
Self-supervised learning with Equivariant Splitting
Self-supervised learning from incomplete measurements of multiple operators.
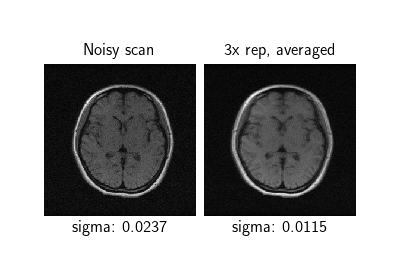
Self-supervised denoising with the Neighbor2Neighbor loss.
Self-supervised denoising with the Generalized R2R loss.
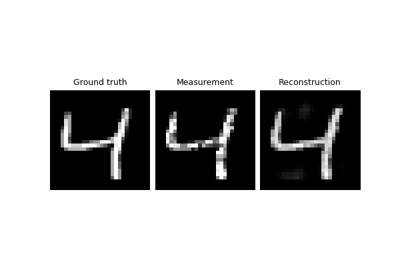
Self-supervised learning with measurement splitting

Deep Equilibrium (DEQ) algorithms for image deblurring
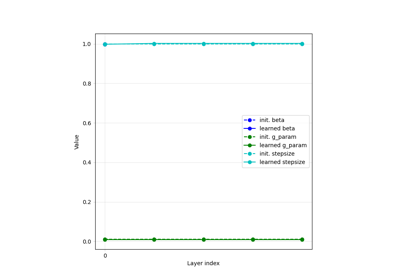
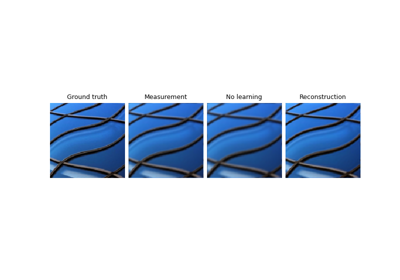
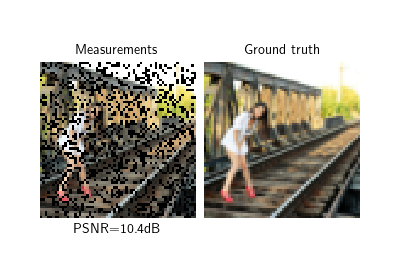
Learned Iterative Soft-Thresholding Algorithm (LISTA) for compressed sensing

Reducing the memory and computational complexity of unfolded network training
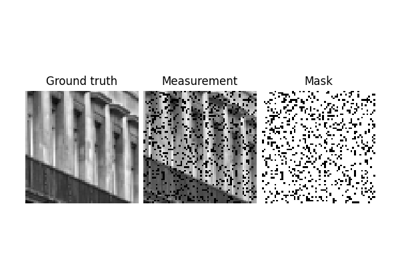
Unfolded Chambolle-Pock for constrained image inpainting