
Inpainting#
- class deepinv.physics.Inpainting(img_size, mask=None, pixelwise=True, device='cpu', rng=None, **kwargs)[source]#
Bases:
DecomposablePhysicsInpainting forward operator, keeps a subset of entries.
The operator is described by the diagonal matrix
\[A = \text{diag}(m) \in \mathbb{R}^{n\times n}\]where \(m\) is a binary mask with \(n\) entries.
This operator is linear and has a trivial SVD decomposition, which allows for fast computation of the pseudo-inverse and proximal operator.
An existing operator can be loaded from a saved
.pthfile viaself.load_state_dict(save_path), in a similar fashion totorch.nn.Module.Masks can also be created on-the-fly using mask generators such as
BernoulliSplittingMaskGenerator, see example below.- Parameters:
mask (torch.Tensor, float) – If the input is a float, the entries of the mask will be sampled from a bernoulli distribution with probability equal to
mask. If the input is atorch.Tensormatchingimg_size, the mask will be set to this tensor. Ifmaskistorch.Tensor, it must be shape that is broadcastable to input shape and will be broadcast during forward call. IfNone, it must be set during forward pass or usingupdatemethod.img_size (tuple) – size of the input images without batch dimension e.g. of shape
(C, H, W)or(C, M)or(M,).device (torch.device) – gpu or cpu.
pixelwise (bool) – Apply the mask in a pixelwise fashion, i.e., zero all channels in a given pixel simultaneously. If existing mask passed (i.e. mask is
torch.Tensor), this has no effect.rng (torch.Generator) – a pseudorandom random number generator for the mask generation. Default to None.
- Examples:
Inpainting operator using defined mask, removing the second column of a 3x3 image:
>>> from deepinv.physics import Inpainting >>> seed = torch.manual_seed(0) # Random seed for reproducibility >>> x = torch.randn(1, 1, 3, 3) # Define random 3x3 image >>> mask = torch.zeros(1, 3, 3) # Define empty mask >>> mask[:, 2, :] = 1 # Keeping last line only >>> physics = Inpainting(mask=mask, img_size=x.shape[1:]) >>> physics(x) tensor([[[[ 0.0000, -0.0000, -0.0000], [ 0.0000, -0.0000, -0.0000], [ 0.4033, 0.8380, -0.7193]]]])
Inpainting operator using random mask, keeping 70% of the entries of a 3x3 image:
>>> from deepinv.physics import Inpainting >>> seed = torch.manual_seed(0) # Random seed for reproducibility >>> x = torch.randn(1, 1, 3, 3) # Define random 3x3 image >>> physics = Inpainting(mask=0.7, img_size=x.shape[1:]) >>> physics(x) tensor([[[[ 1.5410, -0.0000, -2.1788], [ 0.5684, -0.0000, -1.3986], [ 0.4033, 0.0000, -0.0000]]]])
Generate random masks on-the-fly using mask generators:
>>> from deepinv.physics import Inpainting >>> from deepinv.physics.generator import BernoulliSplittingMaskGenerator >>> x = torch.randn(1, 1, 3, 3) # Define random 3x3 image >>> physics = Inpainting(img_size=x.shape[1:]) >>> gen = BernoulliSplittingMaskGenerator(x.shape[1:], split_ratio=0.7) >>> params = gen.step(batch_size=1, seed = 0) # Generate random mask >>> physics(x, **params) # Set mask on-the-fly tensor([[[[-0.4033, -0.0000, 0.1820], [-0.8567, 1.1006, -1.0712], [ 0.1227, -0.0000, 0.3731]]]]) >>> physics.update(**params) # Alternatively update mask before forward call >>> physics(x) tensor([[[[-0.4033, -0.0000, 0.1820], [-0.8567, 1.1006, -1.0712], [ 0.1227, -0.0000, 0.3731]]]])
- __mul__(other)[source]#
Concatenates two forward operators \(A = A_1\circ A_2\) via the mul operation
If the second operator is an Inpainting or MRI operator, the masks are multiplied element-wise, otherwise the default implementation of LinearPhysics is used (see
deepinv.physics.LinearPhysics.__mul__()).- Parameters:
other (deepinv.physics.Physics) – Physics operator \(A_2\)
- Returns:
(
deepinv.physics.Physics) concatenated operator- Return type:
- noise(x, **kwargs)[source]#
Incorporates noise into the measurements \(\tilde{y} = N(y)\)
- Parameters:
x (torch.Tensor) – clean measurements
- Return torch.Tensor:
noisy measurements
- Return type:
Examples using Inpainting:#
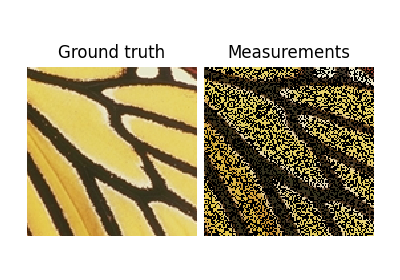

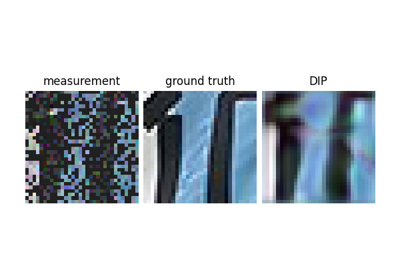
Reconstructing an image using the deep image prior.
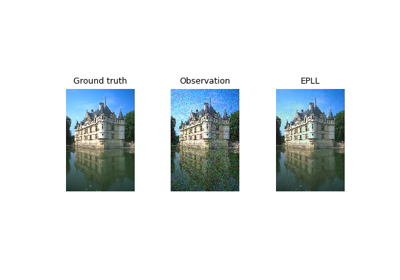
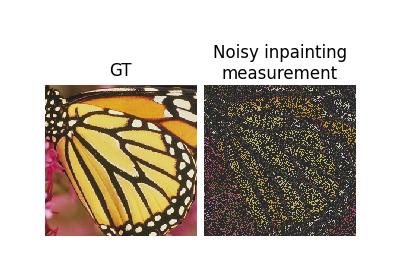
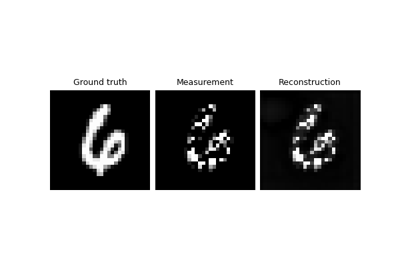
Expected Patch Log Likelihood (EPLL) for Denoising and Inpainting



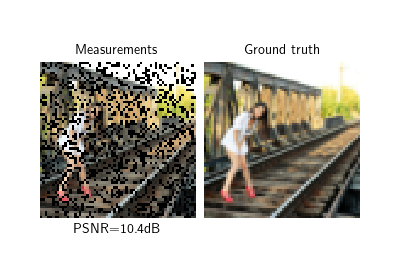
Using state-of-the-art diffusion models from HuggingFace Diffusers with DeepInverse
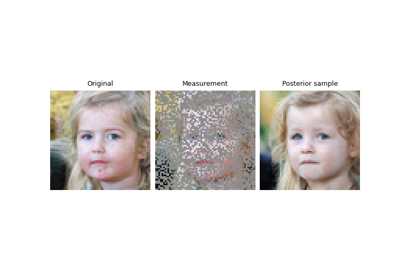
Building your diffusion posterior sampling method using SDEs

Flow-Matching for posterior sampling and unconditional generation

Self-supervised learning with Equivariant Splitting
Self-supervised learning from incomplete measurements of multiple operators.

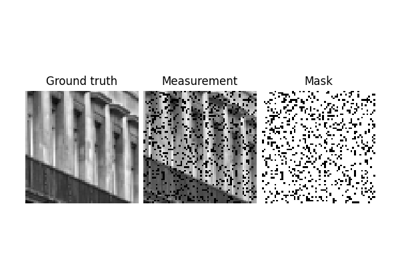
Unfolded Chambolle-Pock for constrained image inpainting