
gaussian_blur#
- deepinv.physics.blur.gaussian_blur(sigma=(1, 1), angle=0, device='cpu')[source]#
Gaussian blur filter.
Defined as
\[G(x, y) = \frac{1}{2\pi\sigma_x\sigma_y} \exp{\left(-\frac{x'^2}{2\sigma_x^2} - \frac{y'^2}{2\sigma_y^2}\right)}\]where \(x'\) and \(y'\) are the rotated coordinates obtained by rotating $(x, y)$ around the origin by an angle \(\theta\):
\[\begin{split}x' &= x \cos(\theta) - y \sin(\theta) \\ y' &= x \sin(\theta) + y \cos(\theta)\end{split}\]with \(\sigma_x\) and \(\sigma_y\) the standard deviations along the \(x'\) and \(y'\) axes.
- Parameters:
sigma (float, tuple[float]) – standard deviation of the gaussian filter. If sigma is a float the filter is isotropic, whereas if sigma is a tuple of floats (sigma_x, sigma_y) the filter is anisotropic.
angle (float) – rotation angle of the filter in degrees (only useful for anisotropic filters)
device (torch.device, str) – device to put the filter on (cpu or cuda)
Examples using gaussian_blur:#
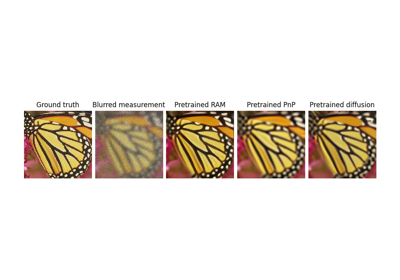
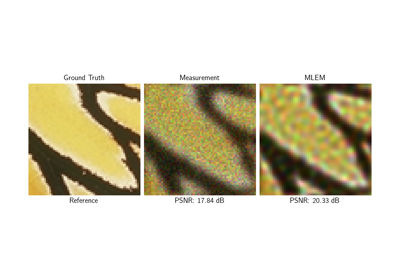
Poisson Inverse Problems with Maximum-Likelihood Expectation-Maximization (MLEM)
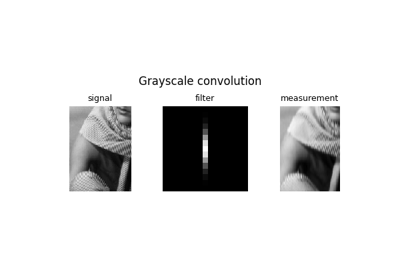

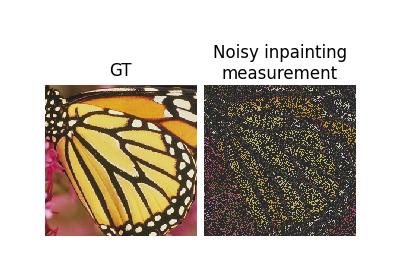
Plug-and-Play algorithm with Mirror Descent for Poisson noise inverse problems.
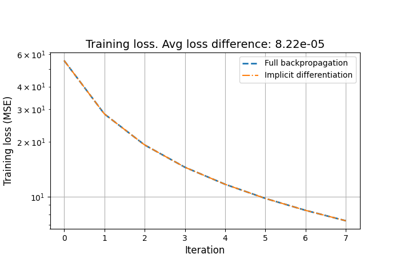
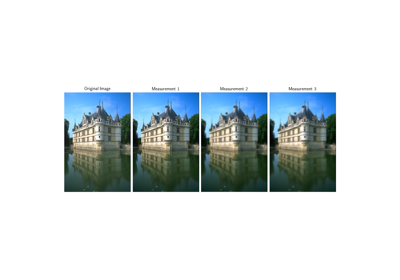
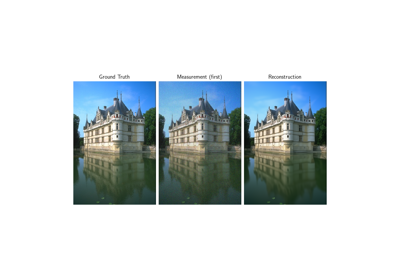
Reducing the memory and computational complexity of unfolded network training